In the industry there is a trend to add a re-ranker at the final stage of a recommendation system. The re-ranker ranks the items that have already been filtered out from an enormous candidate set, aiming to provide the finest level of personalized ordering before the items are ultimately delivered to the user.
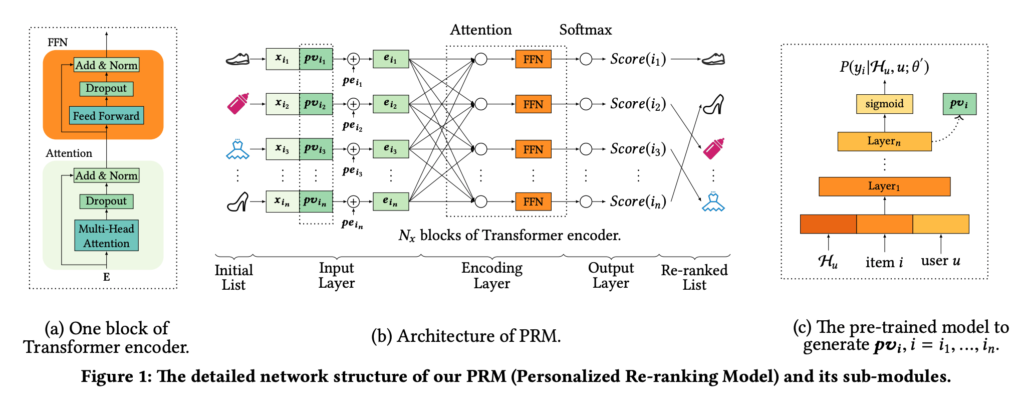
In this post I am trying to have a quick re-implementation of “Personalized Re-ranking for Recommendation” [1]. The model architecture is as follows. A transformer encoder encodes candidate item features and user features, and then attention score is computed for each item (analogous to pairwise ranking). All attention scores will pass through a softmax function and fit with click labels.
import dataclasses
from dataclasses import asdict, dataclass
import torch.nn as nn
from functools import partial, reduce
import torch
import numpy as np
from torch.utils.data import DataLoader, Dataset
import random
from typing import cast
PADDING_SYMBOL = 0
@dataclass
class PreprocessedRankingInput:
state_features: torch.Tensor
src_seq: torch.Tensor
tgt_out_seq: torch.Tensor
slate_reward: torch.Tensor
position_reward: torch.Tensor
tgt_out_idx: torch.Tensor
def _replace(self, **kwargs):
return cast(type(self), dataclasses.replace(self, **kwargs))
def cuda(self):
cuda_tensor = {}
for field in dataclasses.fields(self):
f = getattr(self, field.name)
if isinstance(f, torch.Tensor):
cuda_tensor[field.name] = f.cuda(non_blocking=True)
return self._replace(**cuda_tensor)
def embedding_np(idx, table):
""" numpy version of embedding look up """
new_shape = (*idx.shape, -1)
return table[idx.flatten()].reshape(new_shape)
class TransposeLayer(nn.Module):
def forward(self, input):
return input.transpose(1, 0)
def create_encoder(
input_dim,
d_model=512,
nhead=2,
dim_feedforward=512,
dropout=0.1,
activation="relu",
num_encoder_layers=2,
use_gpu=False,
):
feat_embed = nn.Linear(input_dim, d_model)
encoder_layer = nn.TransformerEncoderLayer(
d_model, nhead, dim_feedforward, dropout, activation
)
encoder_norm = nn.LayerNorm(d_model)
encoder = nn.TransformerEncoder(encoder_layer, num_encoder_layers, encoder_norm)
scorer = nn.Linear(d_model, 1)
final_encoder = nn.Sequential(
feat_embed,
nn.ReLU(),
TransposeLayer(), # make sure batch_size is the first dim
encoder, # nn.TransformerEncoder assumes batch_size is the second dim
TransposeLayer(),
nn.ReLU(),
scorer
)
if use_gpu:
final_encoder.cuda()
return final_encoder
def _num_of_params(model):
return len(torch.cat([p.flatten() for p in model.parameters()]))
def _print_gpu_mem(use_gpu):
if use_gpu:
print(
'gpu usage',
torch.cuda.memory_stats(
torch.device('cuda')
)['active_bytes.all.current'] / 1024 / 1024 / 1024,
'GB',
)
def create_nn(
input_dim,
d_model=512,
nhead=8,
dim_feedforward=512,
dropout=0.1,
activation="relu",
num_encoder_layers=2,
use_gpu=False,
):
feat_embed = nn.Linear(input_dim, d_model)
scorer = nn.Linear(d_model, 1)
final_nn = nn.Sequential(
feat_embed,
nn.ReLU(),
nn.Linear(d_model, d_model),
nn.ReLU(),
nn.Linear(d_model, d_model),
nn.ReLU(),
scorer,
)
if use_gpu:
final_nn.cuda()
return final_nn
def batch_to_score(encoder, batch, test=False):
batch_size, tgt_seq_len = batch.tgt_out_idx.shape
state_feat_dim = batch.state_features.shape[1]
concat_feat_vec = torch.cat(
(
batch.state_features.repeat(1, max_src_seq_len).reshape(
batch_size, max_src_seq_len, state_feat_dim
),
batch.src_seq,
),
dim=2,
)
encoder_output = encoder(concat_feat_vec).squeeze(-1)
if test:
return encoder_output
device = encoder_output.device
slate_encoder_output = encoder_output[
torch.arange(batch_size, device=device).repeat_interleave(tgt_seq_len),
batch.tgt_out_idx.flatten(),
].reshape(batch_size, tgt_seq_len)
return slate_encoder_output
def train(encoder, batch, optimizer):
# shape: batch_size, tgt_seq_len
slate_encoder_output = batch_to_score(encoder, batch)
log_softmax = nn.LogSoftmax(dim=1)
kl_loss = nn.KLDivLoss(reduction="batchmean")
loss = kl_loss(log_softmax(slate_encoder_output), batch.position_reward)
optimizer.zero_grad()
loss.backward()
optimizer.step()
return loss.detach().cpu().numpy()
@torch.no_grad()
def test(encoder, batch):
encoder.eval()
# shape: batch_size, tgt_seq_len
slate_encoder_output = batch_to_score(encoder, batch, test=False)
slate_acc = torch.mean(
(
torch.argmax(slate_encoder_output, dim=1)
== torch.argmax(batch.position_reward, dim=1)
).float()
)
# shape: batch_size, seq_seq_len
total_encoder_output = batch_to_score(encoder, batch, test=True)
batch_size = batch.tgt_out_idx.shape[0]
correct_idx = batch.tgt_out_idx[
torch.arange(batch_size), torch.argmax(batch.position_reward, dim=1)
]
total_acc = torch.mean(
(
torch.argmax(total_encoder_output, dim=1)
== correct_idx
).float()
)
encoder.train()
print(f"slate acc {slate_acc}, total acc {total_acc}")
class ValueModel(nn.Module):
"""
Generate ground-truth VM coefficients based on user features + candidate distribution
"""
def __init__(self, state_feat_dim, candidate_feat_dim, hidden_size):
super(ValueModel, self).__init__()
self.state_feat_dim = state_feat_dim
self.candidate_feat_dim = candidate_feat_dim
self.hidden_size = hidden_size
self.layer1 = nn.Linear(state_feat_dim + 3 * candidate_feat_dim, candidate_feat_dim)
for p in self.parameters():
if p.dim() > 1:
nn.init.xavier_uniform_(p)
# model will be called with fixed parameters
p.requires_grad = False
def forward(
self,
state_features,
src_seq,
tgt_out_seq,
tgt_out_idx,
):
batch_size, max_src_seq_len, candidate_feat_dim = src_seq.shape
max_tgt_seq_len = tgt_out_seq.shape[1]
mean = src_seq.mean(dim=1)
std = src_seq.std(dim=1)
max = src_seq.max(dim=1).values
vm_coef = self.layer1(torch.cat((state_features, mean, std, max), dim=1)).unsqueeze(2)
pointwise_score = torch.bmm(tgt_out_seq, vm_coef).squeeze()
return pointwise_score
class TestDataset(Dataset):
def __init__(
self,
batch_size: int,
num_batches: int,
state_feat_dim: int,
candidate_feat_dim: int,
max_src_seq_len: int,
max_tgt_seq_len: int,
use_gpu: bool,
):
self.batch_size = batch_size
self.num_batches = num_batches
self.state_feat_dim = state_feat_dim
self.candidate_feat_dim = candidate_feat_dim
self.max_src_seq_len = max_src_seq_len
self.max_tgt_seq_len = max_tgt_seq_len
self.use_gpu = use_gpu
self.personalized_vm = ValueModel(state_feat_dim, candidate_feat_dim, 10)
if use_gpu:
self.personalized_vm.cuda()
def __len__(self):
return self.num_batches
def action_generator(self, state_features, src_seq):
batch_size, max_src_seq_len, _ = src_seq.shape
action = np.full((batch_size, self.max_tgt_seq_len), PADDING_SYMBOL).astype(np.long)
for i in range(batch_size):
action[i] = np.random.permutation(
np.arange(self.max_src_seq_len)
)[:self.max_tgt_seq_len]
return action
def reward_oracle(
self,
state_features,
src_seq,
tgt_out_seq,
tgt_out_idx,
):
batch_size = state_features.shape[0]
# shape: batch_size x max_tgt_seq_len
pointwise_score = self.personalized_vm(
state_features,
src_seq,
tgt_out_seq,
tgt_out_idx,
)
slate_rewards = torch.ones(batch_size)
position_rewards = (
pointwise_score == torch.max(pointwise_score, dim=1).values.unsqueeze(1)
).float()
return slate_rewards, position_rewards
@torch.no_grad()
def __getitem__(self, idx):
if self.use_gpu:
device = torch.device("cuda")
else:
device = torch.device("cpu")
if idx % 10 == 0:
print(f"generating {idx}")
_print_gpu_mem(self.use_gpu)
candidate_feat_dim = self.candidate_feat_dim
state_feat_dim = self.state_feat_dim
batch_size = self.batch_size
max_src_seq_len = self.max_src_seq_len
max_tgt_seq_len = self.max_tgt_seq_len
state_features = np.random.randn(batch_size, state_feat_dim).astype(np.float32)
candidate_features = np.random.randn(
batch_size, self.max_src_seq_len, candidate_feat_dim
).astype(np.float32)
# The last candidate feature is the sum of all other features. This just
# simulates that in prod we often have some computed scores based on
# the raw features
candidate_features[:, :, -1] = np.sum(candidate_features[:, :, :-1], axis=-1)
tgt_out_idx = np.full((batch_size, max_tgt_seq_len), PADDING_SYMBOL).astype(
np.long
)
src_seq = np.zeros((batch_size, max_src_seq_len, candidate_feat_dim)).astype(
np.float32
)
tgt_out_seq = np.zeros(
(batch_size, max_tgt_seq_len, candidate_feat_dim)
).astype(np.float32)
for i in range(batch_size):
# TODO: we can test sequences with different lengths
src_seq_len = max_src_seq_len
src_in_idx = np.arange(src_seq_len)
src_seq[i] = embedding_np(src_in_idx, candidate_features[i])
with torch.no_grad():
tgt_out_idx = self.action_generator(state_features, src_seq)
for i in range(batch_size):
tgt_out_seq[i] = embedding_np(tgt_out_idx[i], candidate_features[i])
with torch.no_grad():
slate_rewards, position_rewards = self.reward_oracle(
torch.from_numpy(state_features).to(device),
torch.from_numpy(src_seq).to(device),
torch.from_numpy(tgt_out_seq).to(device),
torch.from_numpy(tgt_out_idx).to(device),
)
slate_rewards = slate_rewards.cpu()
position_rewards = position_rewards.cpu()
return PreprocessedRankingInput(
state_features=torch.from_numpy(state_features),
src_seq=torch.from_numpy(src_seq),
tgt_out_seq=torch.from_numpy(tgt_out_seq),
slate_reward=slate_rewards,
position_reward=position_rewards,
tgt_out_idx=torch.from_numpy(tgt_out_idx),
)
def _collate_fn(batch):
assert len(batch) == 1
return batch[0]
def _set_np_seed(worker_id):
np.random.seed(worker_id)
random.seed(worker_id)
@torch.no_grad()
def create_data(
batch_size,
num_batches,
max_src_seq_len,
max_tgt_seq_len,
state_feat_dim,
candidate_feat_dim,
num_workers,
use_gpu,
):
dataset = DataLoader(
TestDataset(
batch_size,
num_batches,
state_feat_dim,
candidate_feat_dim,
max_src_seq_len,
max_tgt_seq_len,
use_gpu=use_gpu,
),
batch_size=1,
shuffle=False,
num_workers=num_workers,
worker_init_fn=_set_np_seed,
collate_fn=_collate_fn,
)
dataset = [batch for i, batch in enumerate(dataset)]
return dataset
def main(
dataset,
create_model_func,
num_epochs,
state_feat_dim,
candidate_feat_dim,
use_gpu,
):
model = create_model_func(
input_dim=state_feat_dim + candidate_feat_dim, use_gpu=use_gpu
)
print(f"model num of params: {_num_of_params(model)}")
optimizer = torch.optim.Adam(
model.parameters(), lr=0.001, amsgrad=True,
)
test_batch = None
for e in range(num_epochs):
epoch_loss = []
for i, batch in enumerate(dataset):
if use_gpu:
batch = batch.cuda()
if e == 0 and i == 0:
test_batch = batch
test(model, test_batch)
print()
continue
loss = train(model, batch, optimizer)
epoch_loss.append(loss)
if (e == 0 and i < 10) or i % 10 == 0:
print(f"epoch {e} batch {i} loss {loss}")
test(model, test_batch)
print()
print(f"epoch {e} average loss: {np.mean(epoch_loss)}\n")
return model
if __name__ == "__main__":
batch_size = 4096
num_batches = 100
max_src_seq_len = 10
max_tgt_seq_len = 5
state_feat_dim = 7
candidate_feat_dim = 10
num_workers = 0
use_gpu = True
dataset = create_data(
batch_size,
num_batches,
max_src_seq_len,
max_tgt_seq_len,
state_feat_dim,
candidate_feat_dim,
num_workers,
use_gpu,
)
num_epochs = 10
encoder = main(
dataset,
create_encoder,
num_epochs,
state_feat_dim,
candidate_feat_dim,
use_gpu,
)
num_epochs = 10
nnet = main(
dataset,
create_nn,
num_epochs,
state_feat_dim,
candidate_feat_dim,
use_gpu,
)
Code explanation:
We create `TestDataset` to generate random data. Here I create a hypothetical situation where we have state features (user features) and src_seq, which are the features of candidates and the input to the encoder. tgt_out_seq are the features of the items actually shown to the user.
For each ranking data point, the user will click the best item, as you can see in `reward_oracle` function. The best item of the ground truth is determined by a value model, which computes item scores based on user features and the characteristics of candidate features (mean, max, and standard deviation of the candidate distribution).
In `train` function, you can see that we use KLDivLoss to fit attention scores against position_rewards (clicks as mentioned above).
In `test` function , we test how many times the best item resulted from the encoder model is the same as the ground truth.
We also compare the transformer encoder with a classic multi-layer NN.
Final outputs:
Transformer encoder output:
epoch 9 batch 90 loss 0.24046754837036133
slate acc 0.92333984375
epoch 9 average loss: 0.23790153861045837
NN output:
epoch 9 batch 90 loss 0.6537740230560303
slate acc 0.73583984375
epoch 9 average loss: 0.6661167740821838
As we can see, the transformer encoder model clearly outperforms the NN in slate acc.
References
[1] Personalized Re-ranking for Recommendation
 in the direction to improve accumulated returns is:
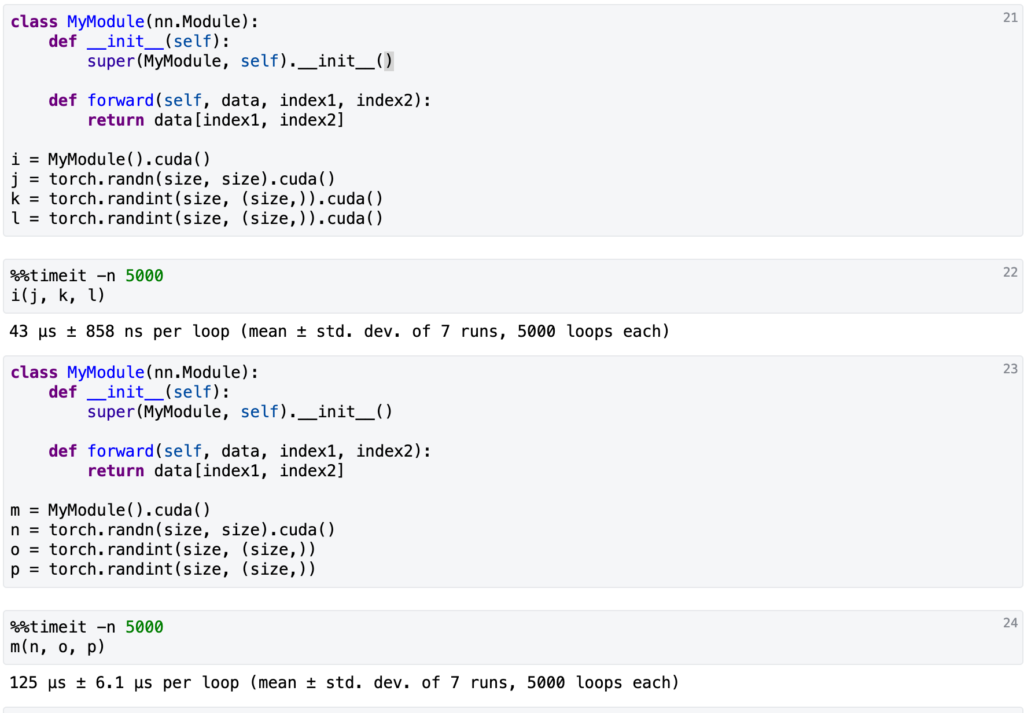
in the direction to improve accumulated returns is:![J(\theta)\newline=\mathbb{E}_{s,a \sim \pi_\theta} [Q^{\pi_\theta}(s,a)] \newline=\mathbb{E}_{s \sim \pi_\theta}[ \mathbb{E}_{a \sim \pi_\theta} [Q^{\pi_\theta}(s,a)]]\newline=\mathbb{E}_{s\sim\pi_\theta} [\int \pi_\theta(a|s) Q^{\pi_\theta}(s,a) da]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-f1469552882502e8a85fcd638aa96963_l3.png "Rendered by QuickLaTeX.com")
![\nabla_{\theta} J(\theta) \newline= \mathbb{E}_{s\sim\pi_\theta} [\int \nabla \pi_\theta(a|s) Q^{\pi_\theta}(s,a) da] \quad\quad \text{Treat } Q^{\pi_\theta}(s,a) \text{ as non-differentiable} \newline= \mathbb{E}_{s\sim\pi_\theta} [\int \pi_\theta(a|s) \frac{\nabla \pi_\theta(a|s)}{\pi_\theta(a|s)} Q^{\pi_\theta}(s,a) da] \newline= \mathbb{E}_{s, a \sim \pi_\theta} [Q^{\pi_\theta}(s,a) \nabla_\theta log \pi_\theta(a|s)] \newline \approx \frac{1}{N} [G_t \nabla_\theta log \pi_\theta(a_t|s_t)] \quad \quad s_t, a_t \sim \pi_\theta](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-f73caef052359dd2ab0ff34a060164b9_l3.png "Rendered by QuickLaTeX.com")
 is the accumulated return beginning from step
is the accumulated return beginning from step  from real samples.
from real samples.  . How can we derive the gradient for off-policy policy gradient, i.e.,
. How can we derive the gradient for off-policy policy gradient, i.e.,  where
where  is a different behavior policy? I think the simplest way to derive it is to connect importance sampling with policy gradient.
is a different behavior policy? I think the simplest way to derive it is to connect importance sampling with policy gradient. ![\mathbb{E}_{p(x)}[x]=\mathbb{E}_{q(x)}[\frac{q(x)}{p(x)}x]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-015bd00f6cb71d9756c08c4d10453e05_l3.png "Rendered by QuickLaTeX.com") . This comes handy when you can’t collect data using
. This comes handy when you can’t collect data using  but you can still compute
but you can still compute  is sampled from
is sampled from  .
. becomes “the value function of the target policy, averaged over the state distribution of the behavior policy” (from DPG paper [6]):
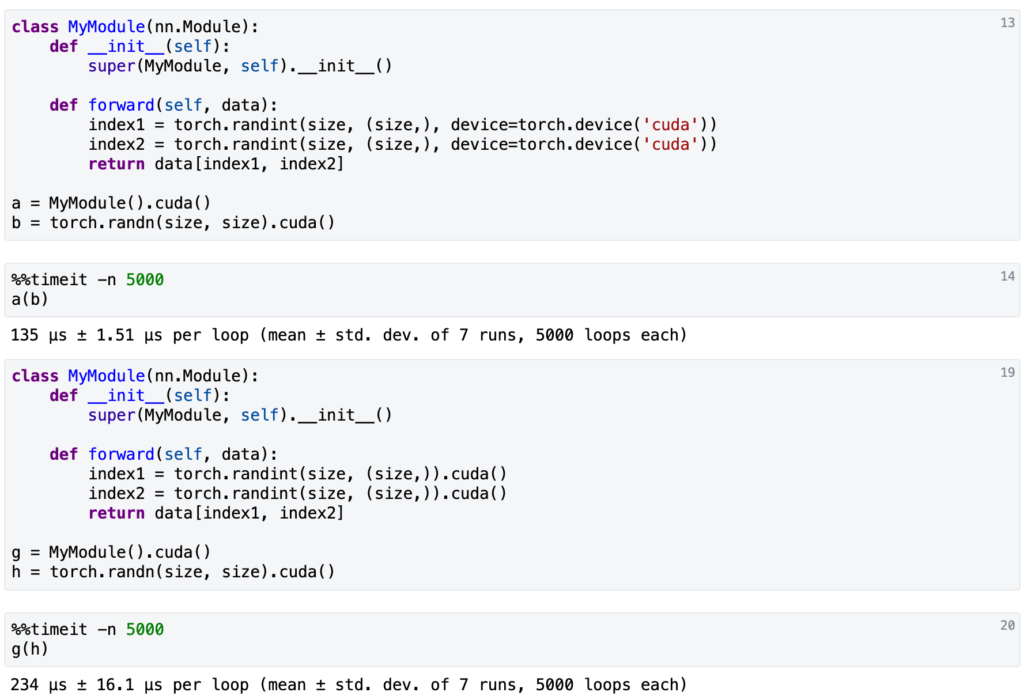
becomes “the value function of the target policy, averaged over the state distribution of the behavior policy” (from DPG paper [6]):![J(\theta)\newline=\mathbb{E}_{s\sim\pi_b}\left[\mathbb{E}_{a \sim \pi_\theta} [Q^{\pi_\theta}(s,a)] \right] \newline=\mathbb{E}_{s,a \sim \pi_b} [\frac{\pi_\theta(a|s)}{\pi_b(a|s)}Q^{\pi_b}(s,a)]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-99250c6e14614db890a3fe8e8487be7e_l3.png "Rendered by QuickLaTeX.com")
![\nabla_{\theta} J(\theta) \newline=\mathbb{E}_{s,a \sim \pi_b} [\frac{\nabla_\theta \pi_\theta(a|s)}{\pi_b(a|s)} Q^{\pi_b}(s,a)] \quad\quad \text{Again, treat } Q^{\pi_b}(s,a) \text{ as non-differentiable}\newline=\mathbb{E}_{s,a \sim \pi_b} [\frac{\pi_\theta(a|s)}{\pi_b(a|s)} Q^{\pi_b}(s,a) \nabla_\theta log \pi_\theta(a|s)] \newline \approx \frac{1}{N}[\frac{\pi_\theta(a_t|s_t)}{\pi_b(a_t|s_t)} G_t \nabla_\theta log \pi_\theta(a_t|s_t)] \quad\quad s_t, a_t \sim \pi_b](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-6861dae8d1e302c9bcfc3d06cac970b0_l3.png "Rendered by QuickLaTeX.com")
![\mathbb{E}_{s,a \sim \pi_b} \left[\frac{\pi_\theta(a|s)}{\pi_b(a|s)} b(s) \nabla_\theta log \pi_\theta(a|s)\right]\newline=\mathbb{E}_{s \sim \pi_b}\left[b(s) \cdot \mathbb{E}_{a \sim \pi_b}\left[\frac{\pi_\theta(a|s)}{\pi_b(a|s)} \nabla_\theta log \pi_\theta(a|s)\right]\right] \newline = \mathbb{E}_{s \sim \pi_b}\left[b(s) \int \pi_b(a|s) \nabla_\theta \frac{\pi_\theta(a|s)}{\pi_b(a|s)} da\right]\newline=\mathbb{E}_{s \sim \pi_b}\left[b(s) \int \nabla_\theta \pi_\theta(a|s) da\right]\newline=\mathbb{E}_{s \sim \pi_b}\left[b(s) \nabla_\theta \int \pi_\theta(a|s) da\right] \newline=\mathbb{E}_{s \sim \pi_b}\left[b(s) \nabla_\theta 1 \right] \newline=0](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-ccc9f1f74889590d36787146035b678d_l3.png "Rendered by QuickLaTeX.com")
 as non-differentiable with regard to
as non-differentiable with regard to  . However
. However  because it is the returns of the choices made by
because it is the returns of the choices made by  refers to actions,
refers to actions,  is the same as our
is the same as our 
![\nabla_\theta \mathbb{E}_{\pi \sim p_\theta(\cdot|x)} \left[ \mathcal{L}_\pi(\theta)\right] \newline= \nabla_\theta \sum\limits_\pi p_\theta(\pi|x)\mathcal{L}_\pi(\theta)\newline=\sum\limits_\pi \left[ \nabla_\theta p_\theta(\pi|x) \cdot \mathcal{L}_\pi(\theta)+p_\theta(\pi|x) \cdot \nabla_\theta \mathcal{L}_\pi(\theta) \right]\newline=p_b(\pi|x) \cdot \sum\limits_\pi \left[ \frac{\nabla_\theta p_\theta(\pi|x)}{p_b(\pi|x)} \cdot \mathcal{L}_\pi(\theta)+\frac{p_\theta(\pi|x)}{p_b(\pi|x)} \cdot \nabla_\theta \mathcal{L}_\pi(\theta) \right]\newline=\mathbb{E}_{\pi\sim p_b(\cdot|x)}\left[\frac{1}{p_b(\pi|x)}\nabla_\theta\left(p_\theta(\pi|x)\mathcal{L}_\pi(\theta)\right)\right]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-227f028e4d3bc7f11df8cb44f48f3e17_l3.png "Rendered by QuickLaTeX.com")
![\nabla_\theta \mathbb{E}_{\pi \sim p_\theta(\cdot|x)} \left[ \mathcal{L}_\pi(\theta)\right] \newline= \nabla_\theta \sum\limits_\pi p_\theta(\pi|x)\mathcal{L}_\pi(\theta)\newline=\sum\limits_\pi \left[ \nabla_\theta p_\theta(\pi|x) \cdot \mathcal{L}_\pi(\theta)+p_\theta(\pi|x) \cdot \nabla_\theta \mathcal{L}_\pi(\theta) \right]\newline=p_\theta(\pi|x) \cdot \sum\limits_\pi \left[ \frac{\nabla_\theta p_\theta(\pi|x)}{p_\theta(\pi|x)} \cdot \mathcal{L}_\pi(\theta)+\frac{p_\theta(\pi|x)}{p_\theta(\pi|x)} \cdot \nabla_\theta \mathcal{L}_\pi(\theta) \right]\newline=\mathbb{E}_{\pi\sim p_\theta(\cdot|x)}\left[\frac{1}{p_\theta(\pi|x)}\nabla_\theta\left(p_\theta(\pi|x)\mathcal{L}_\pi(\theta)\right)\right]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-907143278650354a5e362762565099f1_l3.png "Rendered by QuickLaTeX.com")
 not followed by
not followed by  is treated as non-differentiable.
is treated as non-differentiable. (i.e., one-step optimization,
(i.e., one-step optimization,  ), with the constraint that the policy should also achieve at least some amount of
), with the constraint that the policy should also achieve at least some amount of  in another reward type
in another reward type  :
:



 . The augmented objective function becomes the original objective plus an additional penalty, which makes infeasible solutions sub-optimal:
. The augmented objective function becomes the original objective plus an additional penalty, which makes infeasible solutions sub-optimal:
 and
and  . However, our problem could be in a large scale that it is not feasible to find the saddle point easily. Note that one cannot use stochastic gradient descent to find the saddle point because saddle points are not local minima [8].
. However, our problem could be in a large scale that it is not feasible to find the saddle point easily. Note that one cannot use stochastic gradient descent to find the saddle point because saddle points are not local minima [8].  ‘s, then
‘s, then  would have a monotonic trend:
would have a monotonic trend:
 , we have:
, we have:






 (because
(because  the inequality changes direction)
the inequality changes direction) , we are essentially doing constrained optimization. The larger
, we are essentially doing constrained optimization. The larger  to yet another problem for minimizing the magnitude of the gradient of both
to yet another problem for minimizing the magnitude of the gradient of both 


![\[\text{Find } \mu \in \triangle{(\Pi)} \text{ such that } \bar{\pmb{z}}(\mu) \in \mathcal{C},\]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-5aabcc0aaa1aecb881104e50437125d8_l3.png "Rendered by QuickLaTeX.com")
![\[\min\limits_{\mu \in \triangle(\Pi)} dist(\bar{\pmb{z}}(\mu), \mathcal{C})\]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-7c8b4168ae63dd5b1e37b80842b95655_l3.png "Rendered by QuickLaTeX.com")
 denotes all possible mixed policies so you should think
denotes all possible mixed policies so you should think  as a probability distribution over finitely many stationary policies.
as a probability distribution over finitely many stationary policies.  is a
is a  -dimensional return measurement vector (i.e.,
-dimensional return measurement vector (i.e.,  could then be thought as a weighted sum of returns of individual stationary policies:
could then be thought as a weighted sum of returns of individual stationary policies:  .
.  is the convex set of constraints. Why couldn’t we just get one single stationary policy as the answer? It seems to me that ApproPO has to return a mixture of policies because the author chooses to solve the minimization problem by solving a two-player game based on game theory, which suggests “the average of their plays converges to the solution of the game”.
is the convex set of constraints. Why couldn’t we just get one single stationary policy as the answer? It seems to me that ApproPO has to return a mixture of policies because the author chooses to solve the minimization problem by solving a two-player game based on game theory, which suggests “the average of their plays converges to the solution of the game”.  and any point
and any point  , we define the dual convex cone
, we define the dual convex cone  .
. . Plugging this Lemma into the minimization problem we actually care about, we obtain a min-max game (with
. Plugging this Lemma into the minimization problem we actually care about, we obtain a min-max game (with  ):
):  .
. .
. -player plays first, and the
-player plays first, and the  is minimized. The implicit conditions that the best response algorithm’s solution should also satisfy are
is minimized. The implicit conditions that the best response algorithm’s solution should also satisfy are  and
and  for
for  .
.  . Such a
. Such a  steps. Finally the algorithm would return a random mixture of
steps. Finally the algorithm would return a random mixture of 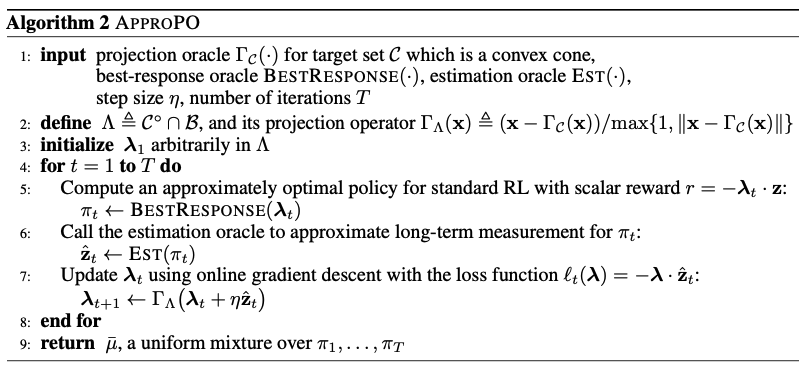
 , the estimation of
, the estimation of 
 . We use the last-digit as the secondary hash function
. We use the last-digit as the secondary hash function  . When a key’s primary hash
. When a key’s primary hash  is full, we probe the next position at
is full, we probe the next position at  . The above hash table is generated by inserting 666, 761, 861 and 961 in order.
. The above hash table is generated by inserting 666, 761, 861 and 961 in order.  , slot 6 is full. So next it probed
, slot 6 is full. So next it probed  . Slot 5 is empty. However, if we had stopped at slot 5, we would wrongly assume 961 was not in the hash table. That’s why when we delete key 761, we need to mark slot 5 as a special empty symbol different than just a new blank slot.
. Slot 5 is empty. However, if we had stopped at slot 5, we would wrongly assume 961 was not in the hash table. That’s why when we delete key 761, we need to mark slot 5 as a special empty symbol different than just a new blank slot. 
 Now if we want to search if key 361 exists, it will start from index 6 (666). Without the extra bits, we will probe denoted until index 1 (the probe will pass slot 4 pretending it is a full slot). But with the extra bit, we will only need to probe until index 4. At index 4, we know no more key that sharing the same probe path has inserted beyond this point.
Now if we want to search if key 361 exists, it will start from index 6 (666). Without the extra bits, we will probe denoted until index 1 (the probe will pass slot 4 pretending it is a full slot). But with the extra bit, we will only need to probe until index 4. At index 4, we know no more key that sharing the same probe path has inserted beyond this point. 

![\eta(\pi)=\mathbb{E}_{s_0, a_0, \cdots}[\sum\limits_{t=0}^{\infty}\gamma^t r(s_t)]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-7aaa56488dc12ec0dfe3ddf7febd9a8e_l3.png "Rendered by QuickLaTeX.com") . The return of another policy
. The return of another policy  can be expressed as
can be expressed as  and a relative difference term:
and a relative difference term:  , where for any given
, where for any given  is called discounted state visitation frequency.
is called discounted state visitation frequency.  with
with  . If the new policy
. If the new policy  .
. , where
, where  ,
,  , and
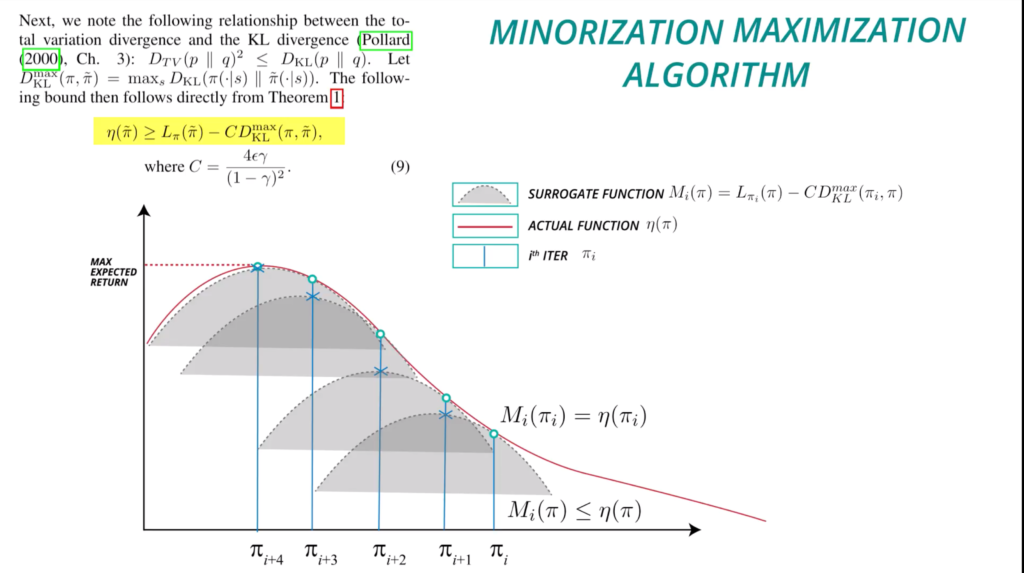
, and  . The inequality-equality becomes just equality if
. The inequality-equality becomes just equality if  . Therefore,
. Therefore, ![\arg\max_{\hat{\pi}}[L_{\pi}(\hat{\pi})-C\cdot D^{max}_{KL}(\pi, \hat{\pi})] \geq L_{\pi}(\pi)-C\cdot D^{max}_{KL}(\pi, \pi)=L_{\pi}(\pi)](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-025e32f81cbf20fcd495ee49d86b168f_l3.png "Rendered by QuickLaTeX.com") . Therefore, we can use algorithm 1 to monotonically improve
. Therefore, we can use algorithm 1 to monotonically improve 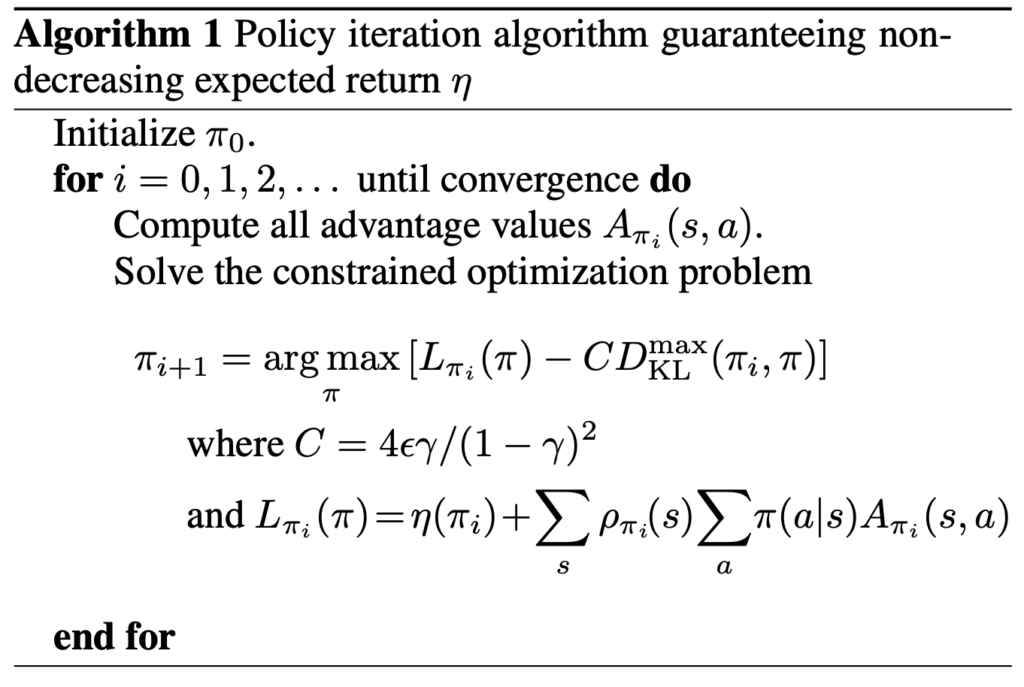
 .
.
 . Putting these practical treatments together, we get:
. Putting these practical treatments together, we get:
 , we will need some importance-sampling re-weighting. And in practice, we can estimate Q-values from trajectories more easily than estimating advantages because we would need exhaust all actions at each step to compute advantages. Thus the objective function using empirical samples eventually becomes:
, we will need some importance-sampling re-weighting. And in practice, we can estimate Q-values from trajectories more easily than estimating advantages because we would need exhaust all actions at each step to compute advantages. Thus the objective function using empirical samples eventually becomes:![\arg\max\limits_{\theta} \mathbb{E}_{s\sim \rho_{\pi_{\theta_{old}}}, a\sim \pi_{\theta_{old}}} \big[\frac{\pi_{\theta}(a|s)}{\pi_{\theta_{old}}(a|s)} Q_{\pi_{\theta_{old}}}(s,a)\big] \newline \text{subject to } \mathbb{E}_{s\sim \rho_{\pi_{\theta_{old}}}} \big[D_{KL}(\pi_{\theta_{old}}(\cdot|s) \| \pi_{\theta}(\cdot|s))\big]\leq \delta](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-9a1fda6467b2fce611cb38f03ebe4150_l3.png "Rendered by QuickLaTeX.com")
 . Using Taylor series expansion, we have
. Using Taylor series expansion, we have  .
.  can be seen as a constant and thus can be ignored during optimization.
can be seen as a constant and thus can be ignored during optimization. , then
, then  . We know that
. We know that  because it is the KL divergence between the same distribution
because it is the KL divergence between the same distribution  . We can also know that
. We can also know that  because the minimum of KL divergence is 0 and is reached when
because the minimum of KL divergence is 0 and is reached when  hence the derivative at
hence the derivative at  must be 0.
must be 0. and
and  , we rewrite the objective function as well as the constraint:
, we rewrite the objective function as well as the constraint:
 while stretching the constraint by the most extent (at the moment when the equality of the constraint holds). Denote the Lagrange Multiplier as
while stretching the constraint by the most extent (at the moment when the equality of the constraint holds). Denote the Lagrange Multiplier as  . From Karush-Kuhn-Tucker (KTT) conditions, we want to find a unique
. From Karush-Kuhn-Tucker (KTT) conditions, we want to find a unique  and the local minimum solution
and the local minimum solution  such that:
such that:


 (actually, the equality should hold because
(actually, the equality should hold because  is positive semi-definite.
is positive semi-definite.  times some constant term. And we know from the fact that: (1)
times some constant term. And we know from the fact that: (1)  , we can’t know
, we can’t know  . Moving
. Moving  to the right side, we have
to the right side, we have  . Here, both
. Here, both  . Therefore,
. Therefore,  . How to compute
. How to compute  as pure matrix inversion, we would need
as pure matrix inversion, we would need  time complexity where
time complexity where  is width/height of
is width/height of  using Conjugate Gradient Method;
using Conjugate Gradient Method;  that makes the constraint equality hold:
that makes the constraint equality hold:  . Thus the
. Thus the  . Therefore,
. Therefore,  . This is exactly one iteration of TRPO update!
. This is exactly one iteration of TRPO update! , which is the solution of the quadratic form
, which is the solution of the quadratic form  . The most straightforward way to solve
. The most straightforward way to solve  and let
and let  . However, computing
. However, computing  .
. is the distance between the i-th solution
is the distance between the i-th solution  and the real solution
and the real solution  indicates how far we are from
indicates how far we are from  .
. , and the step size is determined such that the arrival point after the step, which is
, and the step size is determined such that the arrival point after the step, which is  , should have the smallest
, should have the smallest  . This can also be understood as
. This can also be understood as  should be orthogonal to
should be orthogonal to 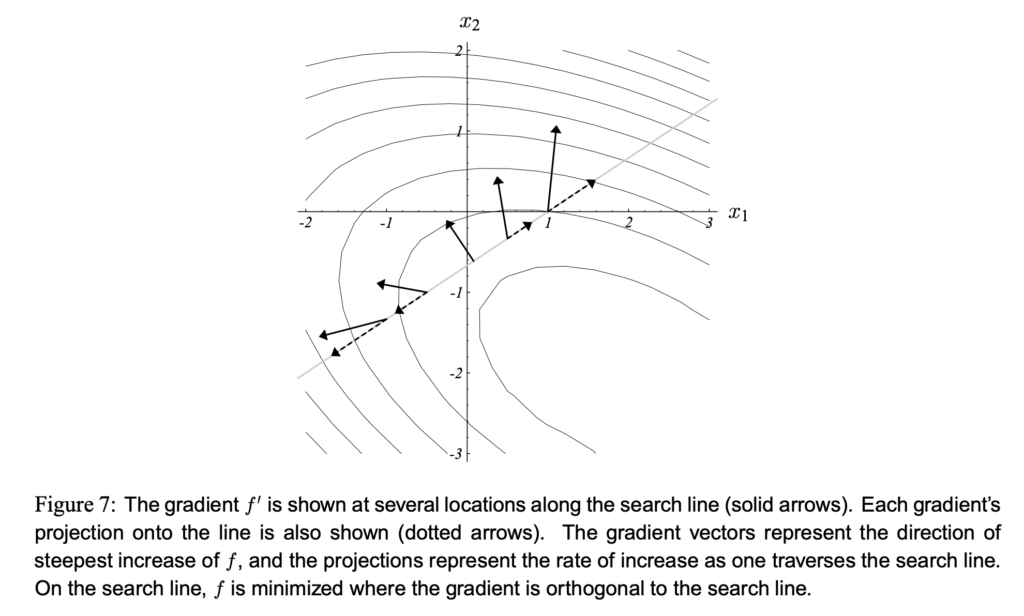
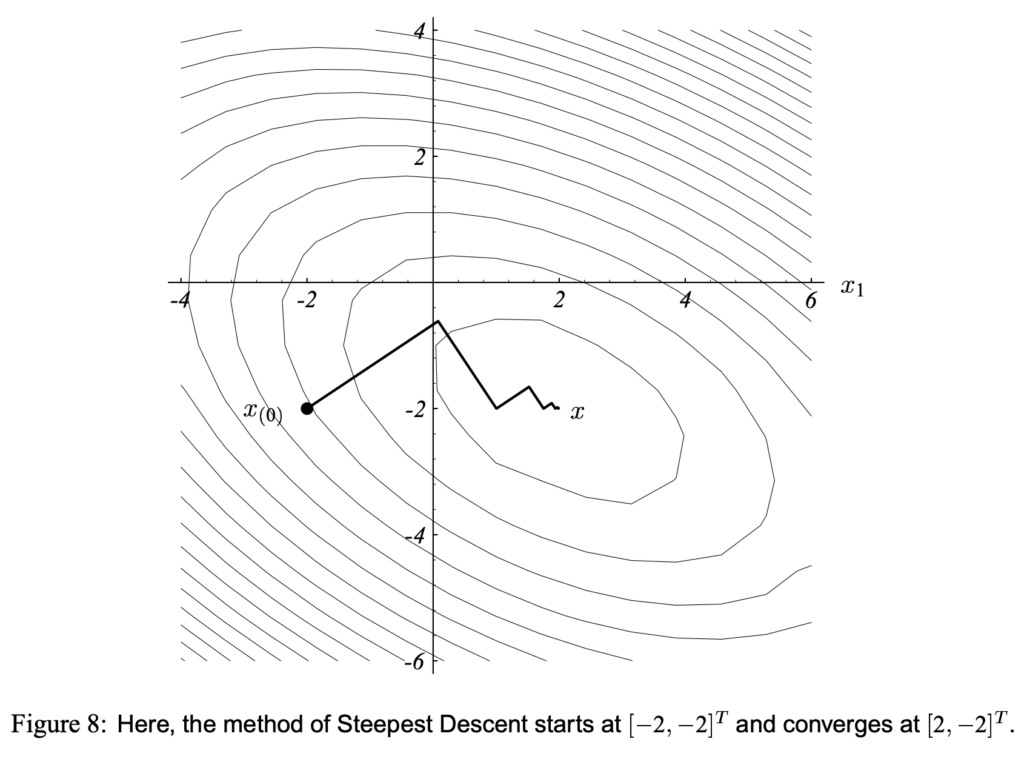
 . And from the intuition, the number of steps is no smaller than the number of bases of the solution space. The luckiest situation is that you pick
. And from the intuition, the number of steps is no smaller than the number of bases of the solution space. The luckiest situation is that you pick  parallel with any of the eigenvectors of
parallel with any of the eigenvectors of 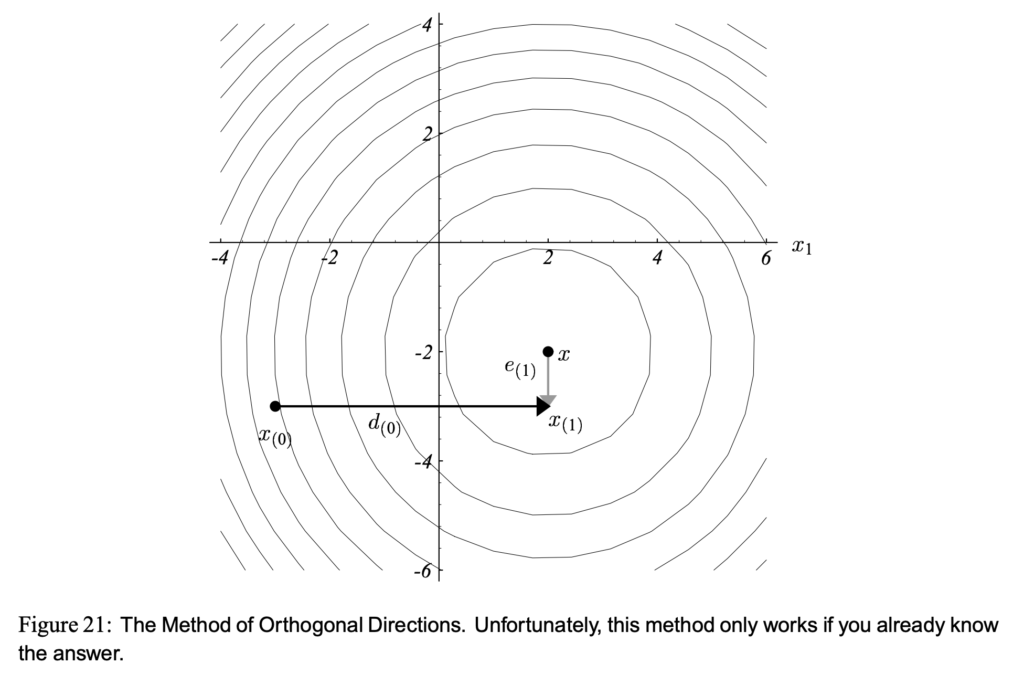
 search directions. If
search directions. If  linearly independent vectors to construct
linearly independent vectors to construct  space and
space and  . Fortunately, it has a nice property that space complexity and time complexity can be reduced to
. Fortunately, it has a nice property that space complexity and time complexity can be reduced to  , where
, where  is the number of nonzero entries of
is the number of nonzero entries of 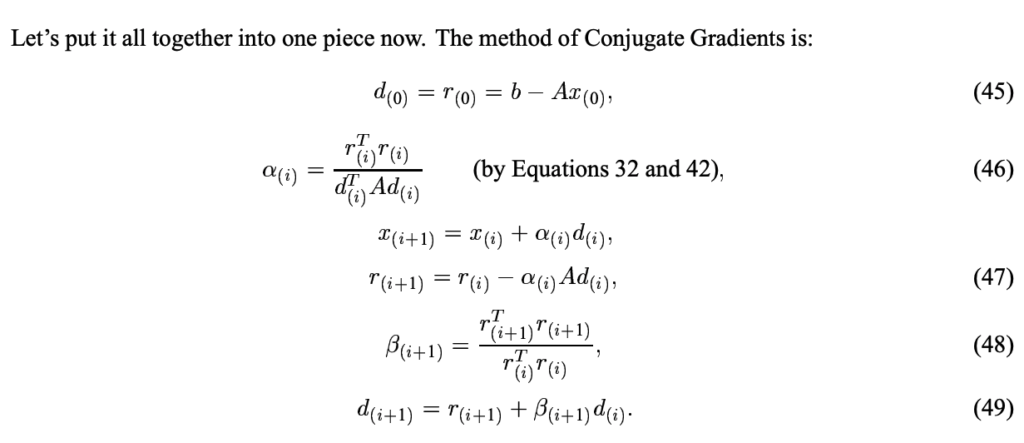
![L^{CLIP}\newline=CLIP\left(\mathbb{E}_{s\sim \rho_{\pi_{\theta_{old}}}, a\sim \pi_{\theta_{old}}} \left[\frac{\pi_{\theta}(a|s)}{\pi_{\theta_{old}}(a|s)} A_{\pi_{\theta_{old}}}(s,a)\right]\right)\newline=CLIP\left(\mathbb{E}_{s\sim \rho_{\pi_{\theta_{old}}}, a\sim \pi_{\theta_{old}}} \left[r(\theta)A_{\pi_{\theta_{old}}}(s,a)\right]\right)\newline=\mathbb{E}_{s\sim \rho_{\pi_{\theta_{old}}}, a\sim \pi_{\theta_{old}}} \left[min(r(\theta), clip(r(\theta), 1-\epsilon, 1+\epsilon)) \cdot A_{\pi_{\theta_{old}}}(s,a)\right]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-7a88ae62a682d12e908cfc57b8527b5d_l3.png "Rendered by QuickLaTeX.com")
 is positive, the model tries to increase
is positive, the model tries to increase  but no more than
but no more than  ; if
; if  . This way, the change of the policy is limited.
. This way, the change of the policy is limited.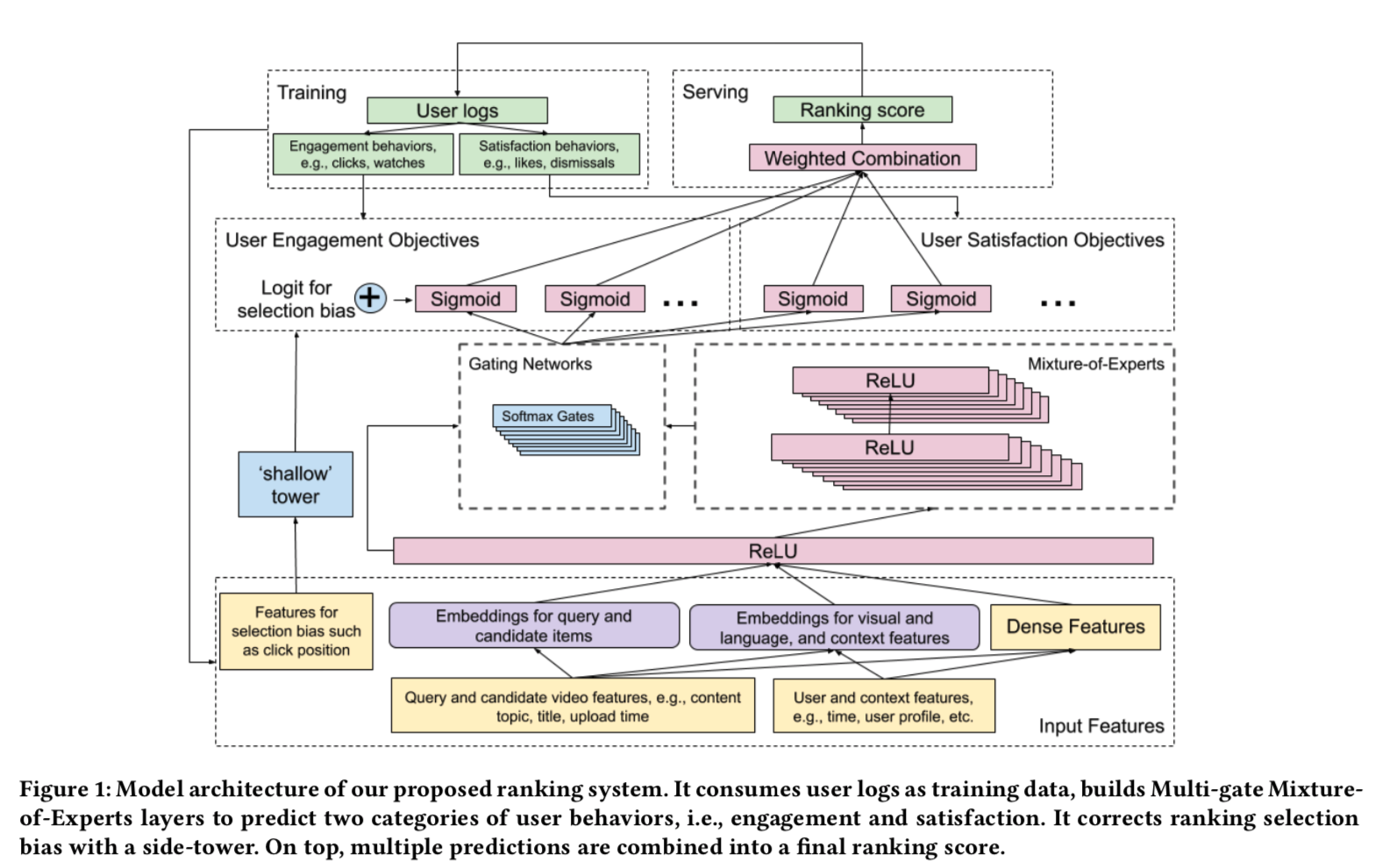


 is some clipped version of importance sampling-based error:
is some clipped version of importance sampling-based error:
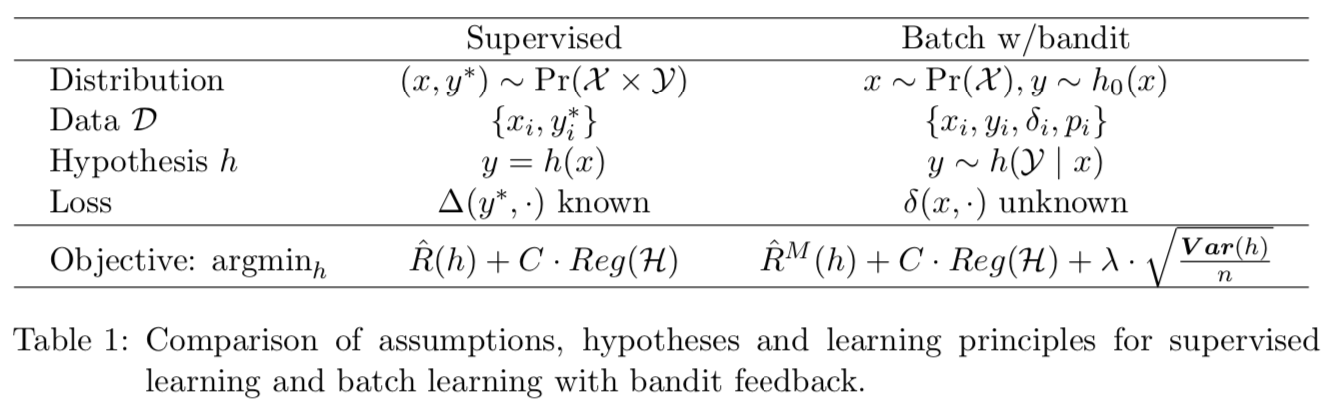
 (I need to verify if this sentence is correct). But as [2] suggested, the part
(I need to verify if this sentence is correct). But as [2] suggested, the part  is said to “penalize the hypotheses with large variance during training using a data-dependant regularizer”.
is said to “penalize the hypotheses with large variance during training using a data-dependant regularizer”. ,
, is the rank of an item
is the rank of an item  in the ranked list
in the ranked list  by the new model,
by the new model,  is the logged list,
is the logged list,  denotes what is the probability of observing an item
denotes what is the probability of observing an item