Here, I am listing some classic proofs regarding the convergence of Q-learning and SARSA in finite MDPs (by definition, in finite Markov Decision Process the sets of states, actions and rewards are finite [1]).
The very first Q-learning convergence proof comes from [4]. The proof is based on a very useful theorem:
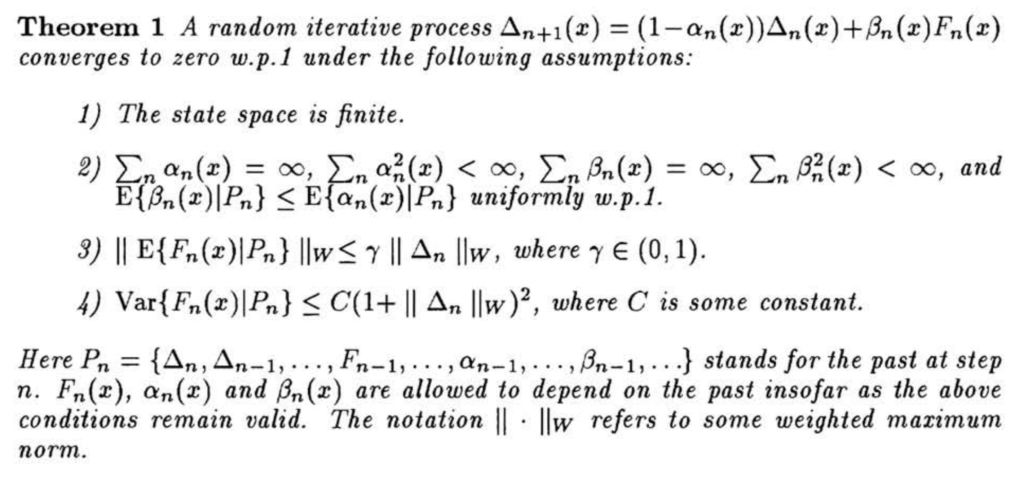
Note that this theorem is general to be applied on multi-dimensional space ( can be multi-dimensional).
can be multi-dimensional).
We can apply Theorem 1 to Q-learning whose update rule is as follows:![Q_{t+1}(s_t, a_t) = (1-\alpha(s_t, a_t))Q_t(s_t, a_t) + \alpha_t(s_t, a_t)[r_t +\gamma \max_{b \in \mathcal{A}}Q_t(s_{t+1}, b)]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-d9e1d375fa70801a1e3ab636c25fdcc1_l3.png "Rendered by QuickLaTeX.com")
Subtracting  from both sides and letting
from both sides and letting  , we have:
, we have:![\triangle_t(s_t,a_t)\newline=(1-\alpha_t(s_t, a_t))\triangle_t(s_t, a_t) + \alpha_t(s,a)[r_t + \gamma\max_{b\in \mathcal{A}}Q_t(s_{t+1}, b) - Q^*(s_t, a_t)]\newline=(1-\alpha_t(s_t, a_t))\triangle_t(s_t, a_t) + \alpha_t(s_t, a_t)F_t(s_t,a_t)](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-a4bd0cd1322d0e6aad3dcc206774cae9_l3.png "Rendered by QuickLaTeX.com")
We can also let  , the learning rate, to be zero for
, the learning rate, to be zero for  . Till this point, we have modeled the Q-learning process exactly as the random iterative process stated in Theorem 1. Hence, as long as we can prove the 4 assumptions are held, we can prove Q-learning converges to the optimal Q-values (i.e.,
. Till this point, we have modeled the Q-learning process exactly as the random iterative process stated in Theorem 1. Hence, as long as we can prove the 4 assumptions are held, we can prove Q-learning converges to the optimal Q-values (i.e.,  converges to 0).
converges to 0).
Assumption 1: trivial to hold since we are focusing on finite MDPs
Assumption 2:  based on our formulation. If we apply a GLIE learning policy (“greedy in the limit with infinite exploration”) [2], then we make assumption 2 hold:
based on our formulation. If we apply a GLIE learning policy (“greedy in the limit with infinite exploration”) [2], then we make assumption 2 hold:

Assumption 3:  . There are some notations that may not look familiar to ordinary audience. First,
. There are some notations that may not look familiar to ordinary audience. First,  means the weighted maximum norm [5]. Therefore,
means the weighted maximum norm [5]. Therefore,  . Second,
. Second,  just means
just means  can be estimated using all the past interactions, i.e.,
can be estimated using all the past interactions, i.e.,  in can be estimated conditional on all the past information rather than just
in can be estimated conditional on all the past information rather than just  .
.
To prove assumption 3 holds, we first look at how we define the optimal Q-function:![Q^*(s,a)=\sum\limits_{s'\in\mathcal{S}}P_a(s,s')[r(s,a,s')+\gamma \max\limits_{a'\in\mathcal{A}}Q^*(s',a')]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-d5c05af23f8d0c7487a0f957147f3c8b_l3.png "Rendered by QuickLaTeX.com")
We can show that  is a fix point of a contraction operator
is a fix point of a contraction operator  , defined over a generic function
, defined over a generic function  :
:![(\textbf{H}q)(s,a)=\sum\limits_{s'\in\mathcal{S}}P_a(s, s')[r(s,a,s')+\gamma \max\limits_{a' \in \mathcal{A}}q(s',a')]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-05808b848f849628b714664d772f3f6e_l3.png "Rendered by QuickLaTeX.com")
Actually,  , a
, a  -contraction, because:
-contraction, because:![\|\textbf{H}q_1 - \textbf{H}q_2\|_\infty \newline=\max\limits_{s,a} \big|\sum\limits_{s'\in \mathcal{S}} P_a(s,s')[r(s,a,s')+\gamma\max\limits_{a' \in \mathcal{A}}q_1(s',a') - r(s,a, s')-\gamma \max\limits_{a'\in\mathcal{A}}q_2(s',a')]\big|\newline=\max\limits_{s,a}\gamma \big|\sum\limits_{s'\in\mathcal{S}}P_a(s,s') [\max\limits_{a' \in \mathcal{A}}q_1(s',a')-\max\limits_{a' \in \mathcal{A}}q_2(s',a')]\big|\newline\text{Think of }\max |\textbf{p}*\textbf{x}| \leq \max|p_1\cdot\max|\textbf{x}|, p_2\cdot \max|\textbf{x}|, \cdots| \text{ if } \textbf{p}>0\newline\leq\max\limits_{s,a}\gamma \sum\limits_{s'\in \mathcal{S}}P_a(s,s')\big|\max\limits_{a' \in \mathcal{A}}q_1(s',a')-\max\limits_{a' \in \mathcal{A}}q_2(s',a')\big|\newline\text{norm property: }|\textbf{u}-\textbf{v}|_\infty \geq |\textbf{u}|_\infty-|\textbf{v}|_\infty\newline\leq \max\limits_{s,a}\gamma \sum\limits_{s'\in \mathcal{S}}P_a(s,s')\max\limits_{a' \in \mathcal{A}}\big|q_1(s',a')-q_2(s',a')\big| \newline \text{Enlarge the domain of max} \newline\leq \max\limits_{s,a}\gamma \sum\limits_{s'\in \mathcal{S}}P_a(s,s')\max\limits_{s'' \in \mathcal{S},a'' \in \mathcal{A}}\big|q_1(s'',a'')-q_2(s'',a'')\big|\newline=\max\limits_{s,a}\gamma \sum\limits_{s'\in \mathcal{S}}P_a(s,s')\|q_1-q_2\|_\infty\newline=\gamma \|q_1-q_2\|_\infty](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-3d90ea69364bba6dcb0961b4034592b0_l3.png "Rendered by QuickLaTeX.com")
Note in one of our previous note [6], we talked about the intuitive meaning of -contraction: consecutive application of makes the function  closer and closer to the fixed point
closer and closer to the fixed point  at the rate of . Another intuitive understanding of
at the rate of . Another intuitive understanding of  (in terms of L2 norm) is that the distance between
(in terms of L2 norm) is that the distance between  and
and  is closer after applying :
is closer after applying :

After proving is a -contraction, we now prove assumption 3:![\|E\{F_t(s,a) | P_n\}\|_w \newline=\sum\limits_{s'\in\mathcal{S}}P_a(s,s')[r(s,a,s')+\gamma\max\limits_{a'\in\mathcal{A}}Q_t(s', a')-Q^*(s,a)]\newline=\sum\limits_{s'\in\mathcal{S}}P_a(s,s')[r(s,a,s')+\gamma\max\limits_{a'\in\mathcal{A}}Q_t(s', a')]-Q^*(s,a)\newline=(\textbf{H}Q_t)(s,a)-Q^*(s,a)\newline\text{Using the fact that }Q^*=\textbf{H}Q^*\newline=(\textbf{H}Q_t)(s,a)-(\textbf{H}Q^*)(s,a)\newline \leq \|\textbf{H}Q_t-\textbf{H}Q^*\|_\infty\newline\leq \gamma \|Q_t-Q^*\|_\infty\newline=\gamma \|\triangle_t\|_\infty](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-e17fe7f973a6af8acded5c30b86cc38f_l3.png "Rendered by QuickLaTeX.com")
It is less obvious to me how to prove assumption 4, even after reading [3] and proposition 5.5 in [8]. But the take away of assumption 4 is that the variance of should be bounded.
At last, y0u can prove the convergence of SARSA [2] in a similar fashion. Hope I’ll have time to cover in the future.
I think the most important note to take away from this post is the pattern to prove convergence of a learning algorithm. Researchers often need to propose variants of Q-learning (such as soft Q-values in maximum entropy environment [6], or SlateQ for dealing with combinatorial actions [9]). They usually need to prove convergence at least in the case of finite MDPs. One can start from the optimal Q-function of their learning algorithm and prove it is a fixed point of a contraction operator. Then, look at the update rule and construct a random iterative process as stated in Theorem 1. Finally, prove the 4 assumptions hold.
Reference
[1] https://medium.com/harder-choices/finite-markov-decision-process-8a34f5e571f9
[2] Convergence Results for Single-Step On-Policy
Reinforcement-Learning Algorithms https://link.springer.com/content/pdf/10.1023/A:1007678930559.pdf
[3] Convergence of Q-learning: a simple proof http://users.isr.ist.utl.pt/~mtjspaan/readingGroup/ProofQlearning.pdf
[4] Convergence of Stochastic Iterative Dynamic Programming Algorithms https://papers.nips.cc/paper/764-convergence-of-stochastic-iterative-dynamic-programming-algorithms.pdf
[7] norm properties: https://en.wikipedia.org/wiki/Norm_(mathematics)#Properties
[8] Neuro Dynamic Programming https://www.dropbox.com/s/naenlfpy0f9vmvt/neuro-dynamic-programming-optimization-and-neural-.pdf?dl=0
[9] SlateQ: https://arxiv.org/abs/1905.12767