Diffusion models are popular these days. This blog [1] summarizes the comparison between diffusion models with other generative models:

Before we go into the technical details, I want to use my own words to summarize my understanding in diffusion models. Diffusion models have two subprocesses: forward process and backward process. The forward process is non-learnable and the backward process is learnable. For every training samples (e.g., images)  , the forward process adds a Gaussian noise
, the forward process adds a Gaussian noise  in
in  steps until
steps until  is (or approximately close to) an isotropic Gaussian. The backward process tries to recover in T steps, starting from an isotropic Gaussian . Each backward step samples
is (or approximately close to) an isotropic Gaussian. The backward process tries to recover in T steps, starting from an isotropic Gaussian . Each backward step samples  from
from  with the probability
with the probability  . The eventual goal is that, given a training sample, we want
. The eventual goal is that, given a training sample, we want  to be as high as possible, where
to be as high as possible, where  . It turns out that maximizing will be equivalent to optimizing an ELBO objective function, which is equivalent to make
. It turns out that maximizing will be equivalent to optimizing an ELBO objective function, which is equivalent to make  be as close as possible to the distribution
be as close as possible to the distribution  . Because in the forward process we have recorded and for all
. Because in the forward process we have recorded and for all  , can be written in a closed form. Therefore, we can use a loss function (i.e., KL divergence between two Gaussians) to train
, can be written in a closed form. Therefore, we can use a loss function (i.e., KL divergence between two Gaussians) to train  by fitting against .
by fitting against .

More technical details
We start from the objective, that the data likelihood  under a diffusion model , is maximized:
under a diffusion model , is maximized:  . Similar to stochastic variational inference, we can derive a lower bound and maximize the lower bound instead:
. Similar to stochastic variational inference, we can derive a lower bound and maximize the lower bound instead:
(1) ![\begin{equation*} \begin{split} & maximize \;\; \log p_\theta(x_0) \\ & \geq \log p_\theta(x_0) - \underbrace{D_{KL}\left( q\left( \mathbf{x}_{1:T} | \mathbf{x}_0 \right) || p_\theta\left( \mathbf{x}_{1:T} | \mathbf{x}_0 \right) \right)}_\text{KL divergence is non-negative} \\ &=\log p_\theta(x_0) - \mathbb{E}_{x_{1:T} \sim q(x_{1:T}|x_0) } \left[ \log \underbrace{\frac{q\left(\mathbf{x}_{1:T}|\mathbf{x}_0 \right)}{p_\theta\left( \mathbf{x}_{0:T}\right) / p_\theta \left( \mathbf{x}_0\right)}}_\text{Eqvlt. to $p_\theta\left( \mathbf{x}_{1:T} | \mathbf{x}_0 \right)$} \right] \\ &=\log p_\theta(x_0) - \mathbb{E}_{x_{1:T} \sim q(x_{1:T}|x_0) } \left[ \log \frac{q\left( \mathbf{x}_{1:T} | \mathbf{x}_0 \right)}{p_\theta \left( \mathbf{x}_{0:T}\right) } + \log p_\theta\left(\mathbf{x}_0 \right) \right] \\ &=- \mathbb{E}_{x_{1:T} \sim q(x_{1:T}|x_0) } \left[ \log \frac{q\left(\mathbf{x}_{1:T} | \mathbf{x}_0\right) }{p_\theta\left( \mathbf{x}_{0:T}\right)} \right] \\ &=-\mathbb{E}_{q}\biggl[ \\ &\quad \underbrace{D_{KL}\left( q( \mathbf{x}_T | \mathbf{x}_0) || p_\theta(\mathbf{x}_T) \right)}_\text{$L_T$} \\ &\quad + \sum\limits_{t=2}^T \underbrace{D_{KL}\left( q(\mathbf{x}_{t-1} | \mathbf{x}_t, \mathbf{x}_0) || p_\theta(\mathbf{x}_{t-1}|\mathbf{x}_t) \right)}_\text{$L_{t-1}$} \\ &\quad \underbrace{- \log p_\theta(\mathbf{x}_0 | \mathbf{x}_1)}_\text{$L_{0}$} \\ &\biggr] \end{split} \end{equation*}](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-a6cb09750180f099f97c7db6eafeceaa_l3.png "Rendered by QuickLaTeX.com")
We now focus on  for
for  because
because  is non-learnable and
is non-learnable and  is trivially handled. With some mathematical computation, we have
is trivially handled. With some mathematical computation, we have
(2) 
and
(3) 
where  ,
,  , and
, and  are terms involving noise scheduling steps
are terms involving noise scheduling steps  .
.
Now, the other part of is  , which can be parameterized as
, which can be parameterized as
(4) 
Because KL divergence betwen two Gaussians [5] can be represented as ![\mathrm{KL}[P\,||\,Q] = \frac{1}{2} \left[ (\mu_2 - \mu_1)^T \Sigma_2^{-1} (\mu_2 - \mu_1) + \mathrm{tr}(\Sigma_2^{-1} \Sigma_1) - \ln \frac{|\Sigma_1|}{|\Sigma_2|} - n \right]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-521cdfe1d097a186eb5421c808c1e3f3_l3.png "Rendered by QuickLaTeX.com") , (i.e., the KL divergence between and
, (i.e., the KL divergence between and  ) can be expressed analytically and fed into autograd frameworks for optimization.
) can be expressed analytically and fed into autograd frameworks for optimization.
Code Example
The exact code example I was reading is https://colab.research.google.com/github/JeongJiHeon/ScoreDiffusionModel/blob/main/DDPM/DDPM_example.ipynb, which is easy enough.
Our data is just two 2D Gaussian distributions. One distribution will be sampled more often (prob=0.8) than the other.
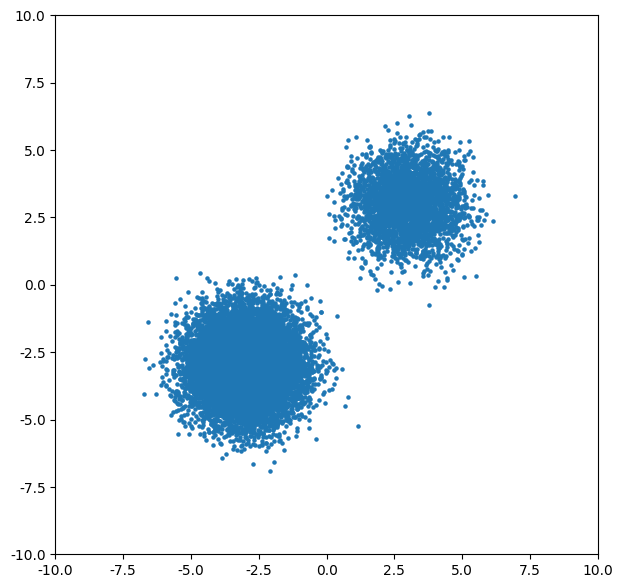
And after 1000 training iterations, here is the inference process looks like: we have N data points which are pure Gaussian noises. are now learned such that sampling from it can recover the original data distribution (although I feel the two distributions are not 8-2 in quantities):
Reference
([1] and [2] are good learning materials for me to write this post; [3] and [4] are good coding examples.)
[1] https://lilianweng.github.io/posts/2021-07-11-diffusion-models/
[2] https://aman.ai/primers/ai/diffusion-models/
[3] https://www.youtube.com/watch?v=a4Yfz2FxXiY
[4] https://github.com/JeongJiHeon/ScoreDiffusionModel#content–tutorial–blog-kr-