Monte Carlo Tree Search (MCTS) has been successfully applied in complex games such as Go [1]. In this post, I am going to introduce some basic concepts of MCTS and its application.
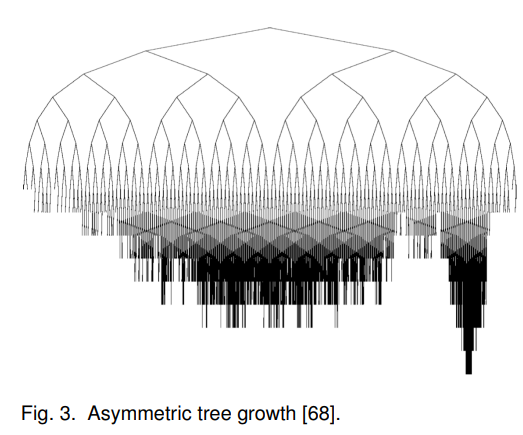
MCTS is a method for finding optimal decisions in a given domain by taking random samples in the decision space and building a search tree according to the results. Search trees are built to gradually cover the search space and in an iterative fashion:
and may result into asymmetric structure:
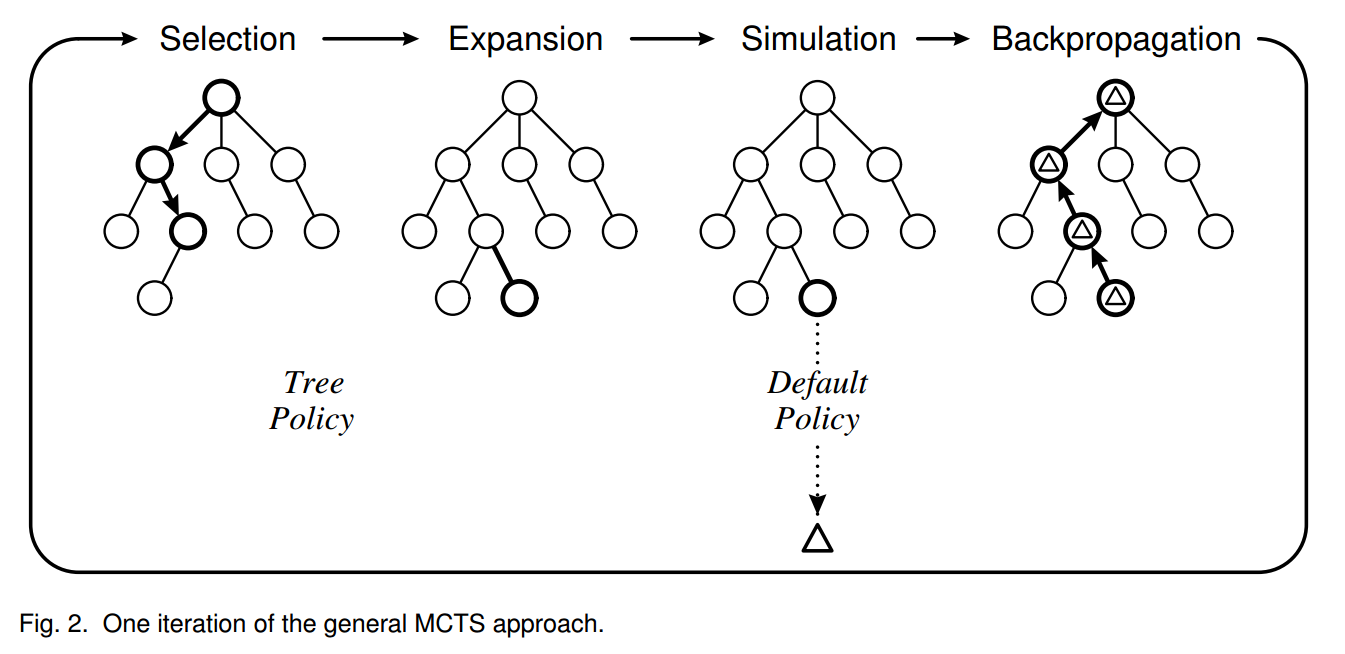
Each iteration is grouped by four phases, selection, expansion, simulation and backpropagation [4]:

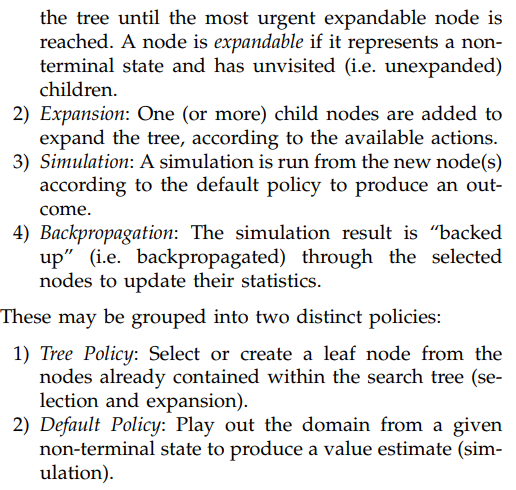
The tree policy and default policy may be defined differently in variations of MCTS. However they all rest on two fundamental concepts: the true value of an action may be approximated using random simulation; and that these values may be used efficiently to adjust the policy towards a best-first strategy [4].
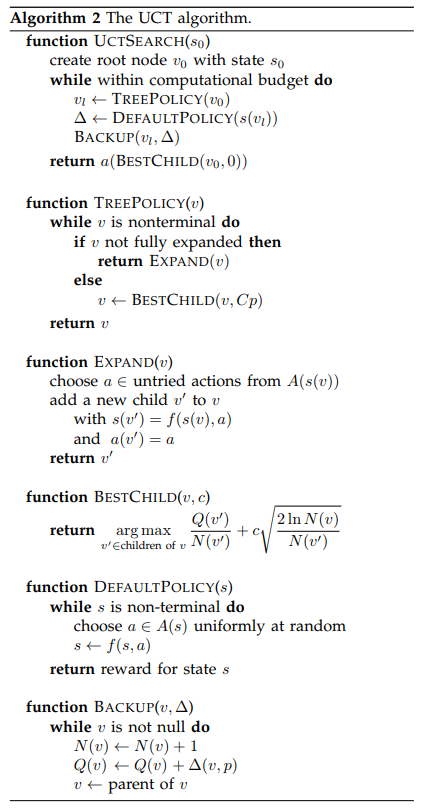
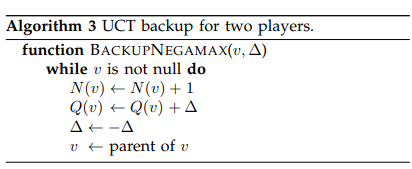
One most widely used variation of MCTS is UCT (Upper Confidence Bounds for Trees), whose tree policy is to select leaf nodes according to a multi-armed bandit metric called UCB1. The pseudo-code is given by [4]:
MCTS’s recent application in Go actually come from three papers [1] (AlphaGo), [2] (AlphaGo Zero), and [9] (AlphaZero). Let’s look at the first paper first [1], in which there are several networks trained:
1) a supervised learning policy network  . This is a straightforward, as its input is the board state
. This is a straightforward, as its input is the board state  (plus some move history and human engineered features) and its output is the action
(plus some move history and human engineered features) and its output is the action  to take. The training data is essentially state-action pairs
to take. The training data is essentially state-action pairs  sampled from real human play matches. The goal of this supervised learning policy network is to accurately predict moves. Therefore, it is designed with convoluted structures with 13 layers. As reported, it can achieve 55.7% accuracy and takes 3ms per prediction.
sampled from real human play matches. The goal of this supervised learning policy network is to accurately predict moves. Therefore, it is designed with convoluted structures with 13 layers. As reported, it can achieve 55.7% accuracy and takes 3ms per prediction.
2) a fast supervised learning policy network  , which results in simpler structure, faster prediction time but less accuracy. It requires 2us per prediction and has 24.2% accuracy reportedly.
, which results in simpler structure, faster prediction time but less accuracy. It requires 2us per prediction and has 24.2% accuracy reportedly.
3) a policy network  trained based on the supervised learning policy network and by Reinforcement Learning (more specifically, policy gradient method [3]). I think this is a smart choice: if you train a policy network by RL from scratch you may not end up learning well because the game is too complex such that the network will take long time until it adjusts its weights to some meaningful values. Initializing the weights of to is like an effective bootstrapping. On the other hand, ‘s goal is simply achieving prediction accuracy as high as possible, rather than our real goal for winning. The RL-based policy network would adjust the network to fully align with the goal of winning. Thus, a trained should perform stronger than .
trained based on the supervised learning policy network and by Reinforcement Learning (more specifically, policy gradient method [3]). I think this is a smart choice: if you train a policy network by RL from scratch you may not end up learning well because the game is too complex such that the network will take long time until it adjusts its weights to some meaningful values. Initializing the weights of to is like an effective bootstrapping. On the other hand, ‘s goal is simply achieving prediction accuracy as high as possible, rather than our real goal for winning. The RL-based policy network would adjust the network to fully align with the goal of winning. Thus, a trained should perform stronger than .
4) a value network  which estimates the expected outcome from position played by using the RL policy network for both players:
which estimates the expected outcome from position played by using the RL policy network for both players: ![v^{p_{\rho}}(s) = \mathbb{E}[z_t | s_t=s, a_{t \cdots T} \sim p_{\rho}]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-c4da6eea96d7f4fed2f05c7f1b9395c7_l3.png "Rendered by QuickLaTeX.com") . As the paper [1] stated, the most useful value network should estimate the expected outcome under perfect play,
. As the paper [1] stated, the most useful value network should estimate the expected outcome under perfect play,  , which means each of the two players acts optimally to maximize his own winning probability. But since we do not have perfect play as ground truth, we have to use to generate gameplay data. Therefore, we have
, which means each of the two players acts optimally to maximize his own winning probability. But since we do not have perfect play as ground truth, we have to use to generate gameplay data. Therefore, we have  . But note that, training a value network is not the only way to estimate
. But note that, training a value network is not the only way to estimate  . We can also use Monte Carlo rollouts to simulate a large number games by using . However it takes much larger computational resource.
. We can also use Monte Carlo rollouts to simulate a large number games by using . However it takes much larger computational resource.
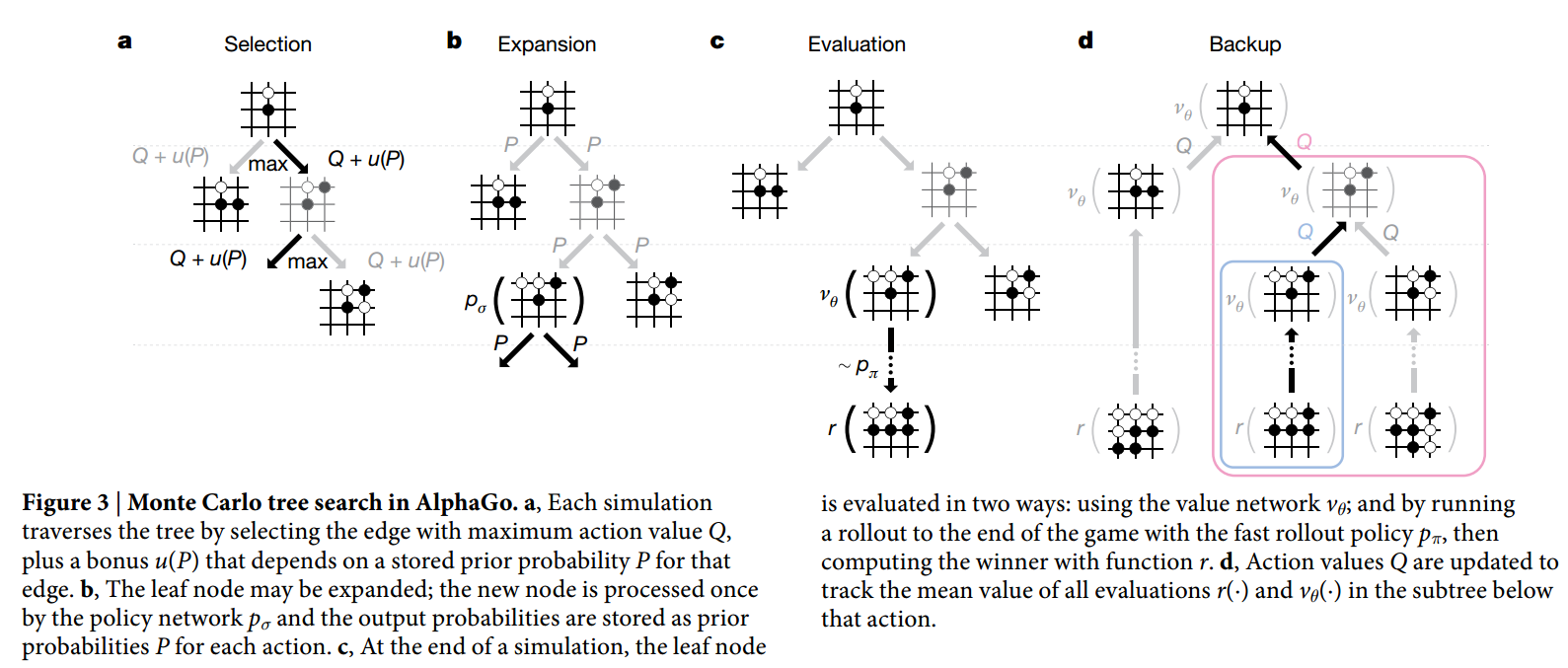
After training the four networks, MCTS will base on these networks to select actions by lookahead search. Let’s look at a typical iteration of MCTS in Alphago:
You could think in such way that each node in the search tree maintains two values  and
and  :
:
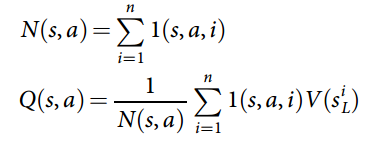
where  is the value of the leaf state after the selection phase in simulation
is the value of the leaf state after the selection phase in simulation  . combines the estimated outcome from
. combines the estimated outcome from  and a roll out outcome
and a roll out outcome  using the fast policy network
using the fast policy network  :
:

Maintaining and is primarily for defining the tree policy, the policy used to navigate nodes in the selection phase. Specifically, at each time step  during the selection phase of a simulation, an action
during the selection phase of a simulation, an action  is selected according to:
is selected according to:
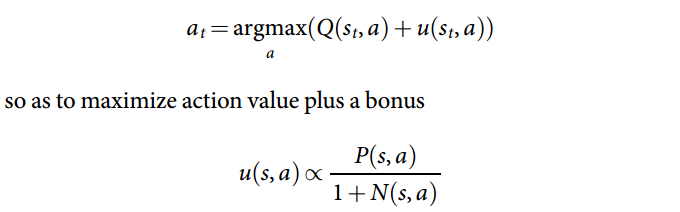
This is a little different than UCB1 (Upper Confidence Bound) used in UCT (Upper Confidence Bounds for Trees), a common version of MCTS that characterizes using UCB1 in the selection phase [4]:
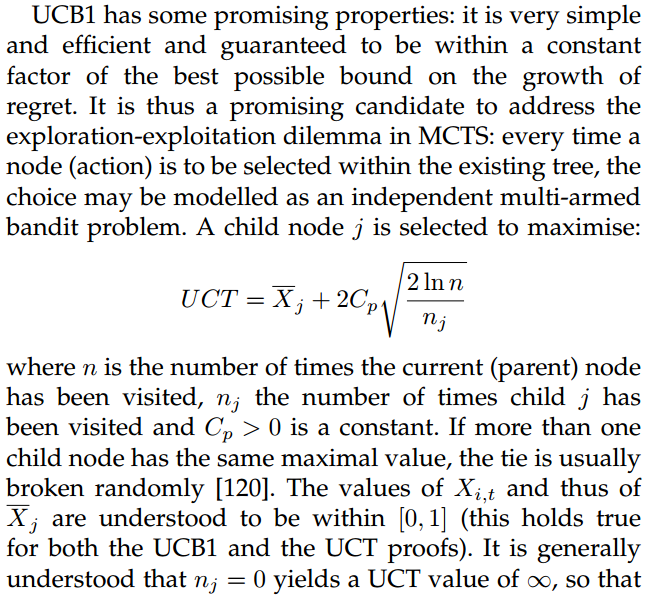
However, both AlphaGo’s MCTS and UCT share the same idea as to model the action choice in the selection phase as a bandit problem. As such, the action values dynamically change according to historically received average rewards, as well as the number of total trials and trials for that action specifically.
In summary, AlphaGo’s MCTS actually only uses two networks ( and ) from the four trained networks ( , ,
, ,  , and ). The two networks and are only used in the leaf evaluation function
, and ). The two networks and are only used in the leaf evaluation function  .
.
AlphaGo also embodies two principles of reducing the search space in MCTS. First, to reduce the breadth of search, it selectively pick and expand the action nodes based on the action values calculated as a bandit problem. Additionally, in the simulation (evaluation) phase, the rollout uses the fast policy network to sample actions which also reduces the breadth of the search. Second, to reduce the depth of search, it relies on the leaf evaluation function to evaluate the board value (combined with just one roll out, instead of fully relying on a large number of rollouts).
Now, let’s look at the second version AlphaGo, which is called AlphaGo Zero [2]. The most significant change is that AlphaGo Zero does not require any human play data as in AlphaGo to bootstrap itself. AlphaGo Zero gets rid of training multiple networks but only keeps one unified neural network  which learns to output two heads: (1) an action probability distribution (
which learns to output two heads: (1) an action probability distribution ( , a vector, whose component is
, a vector, whose component is  ); (2) and outcome value prediction (
); (2) and outcome value prediction ( , a scalar).
, a scalar).
The neural network gets initialized with random weights and will be updated in iterations. Self-play data are generated by two Go AI bots which equip the same neural network snapshot. The neural network snapshot is picked periodically as the best performant player seen so far in all previous iterations. Let us denote the picked snapshot as  . At each move, an MCTS search is executed based on
. At each move, an MCTS search is executed based on  in the simulation phase. The output of the MCTS search is an action distribution
in the simulation phase. The output of the MCTS search is an action distribution  determined by the upper confidence bound for each action:
determined by the upper confidence bound for each action:  where
where  , the same bound metric as in AlphaGo [1].
, the same bound metric as in AlphaGo [1].
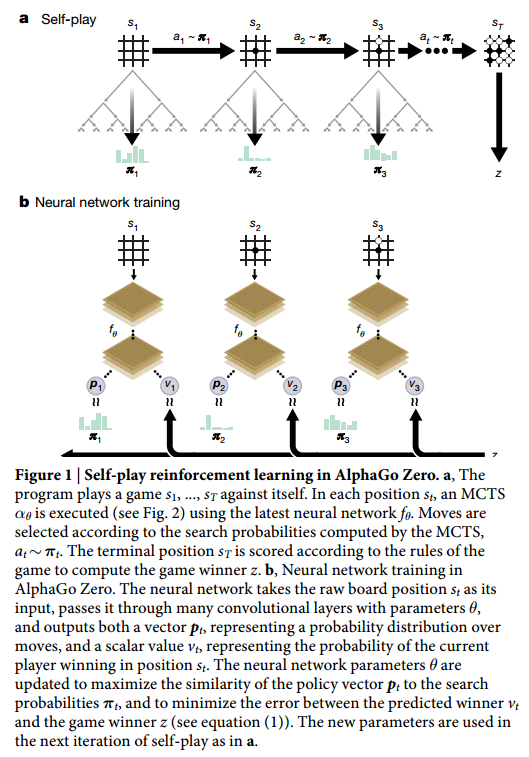
When such self-play proceeds to the game end, we store the game outcome and each of the previous MCTS action distributions as a distribution-outcome tuple  . These distribution-outcome tuples will serve as the training data for updating the weights of . The full procedure is illustrated below:
. These distribution-outcome tuples will serve as the training data for updating the weights of . The full procedure is illustrated below:
The third version, AlphaZero [9], has further differences than AlphaGo Zero:
- AlphaZero is more general, which can be applied to other different games such as chess and shogi. It achieves so by supporting evaluating non-binary game outcomes and less exploiting game-specific training tricks.
- In AlphaGo Zero, self-play games were generated by the selected snap of the best player from previous iterations. In contrast, AlphaZero simply maintains a single neural network that is updated continually. So self-play games are always generated by the latest parameters for this neural network.
MCTS convergence
According to [5,6], in UCT, the failure probability at the root of the tree (i.e., the probability of selecting a suboptimal action) converges to zero at a polynomial rate as the number of games simulated grows to infinity. In a two-person zero-sum game, this means UCT converges to the minimax algorithm’s solution, which is the optimal move if both players are under perfect play, which is also the move to minimize the maximal possible loss the opponent can exert.
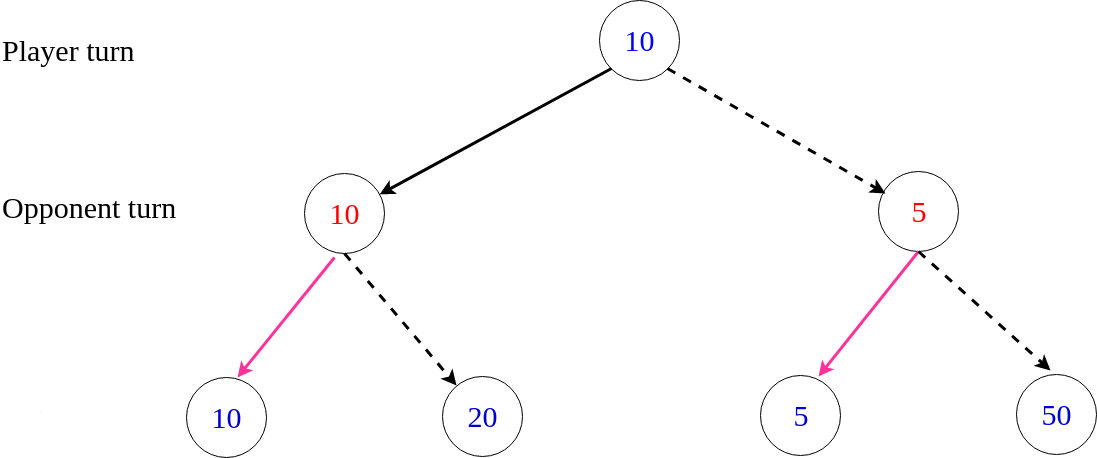
Here, I am using a small example to sketch why UCT could converge to minimax. First, the following plot shows a minimax tree for a game. Each of two players makes exactly one move until the game ends. The numbers in the circles indicate the reward to the player. Solid lines indicate the actual moves selected under perfect play by both players.
Now, suppose we start to build a UCT. Since UCT has the exploration term  , we could imagine that at some point each terminal state has been visited once:
, we could imagine that at some point each terminal state has been visited once:
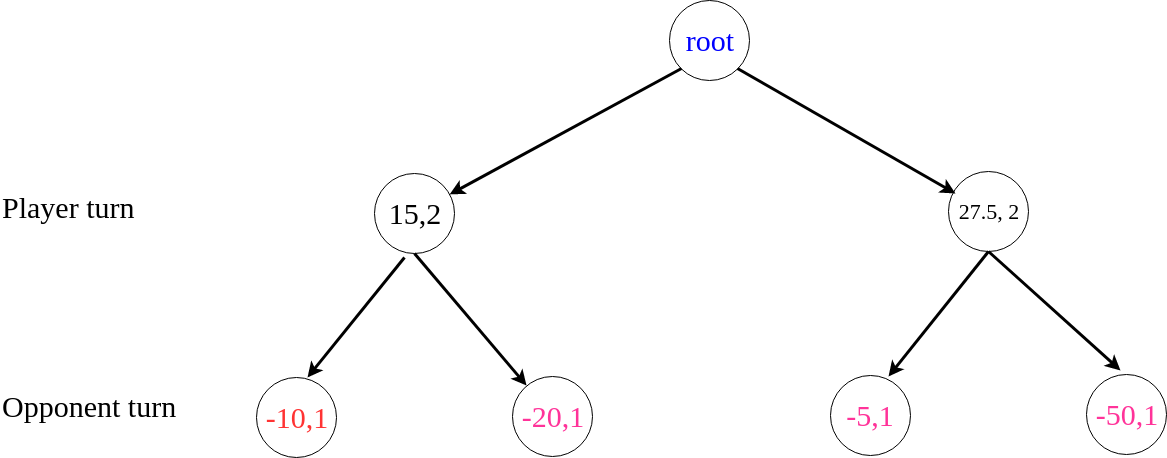
Here in each circle there is a tuple indicating the average reward and visited times on that node. If MCTS stops at this moment, it seems like the player would choose the right action because it has a higher average reward, which is different than the minimax solution.
However, after that, UCT would traverse the node (-5,1) much more frequently than the node (-50,1). Therefore, The node (27.5, 2) will eventually converge to its real reward 5.
Reference