In this post, I am sharing my understanding regarding Deterministic Policy Gradient Algorithm (DPG) [1] and its deep-learning version (DDPG) [2].
We have introduced policy gradient theorem in [3, 4]. Here, we briefly recap. The objective function of policy gradient methods is:

where  represents
represents  ,
,  is the stationary distribution of Markov chain for ,
is the stationary distribution of Markov chain for , ![V^\pi(s)=\mathbb{E}_{a \sim \pi}[G_t|S_t=s]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-81e80918e8ee5ee716538d3fd9167787_l3.png "Rendered by QuickLaTeX.com") , and
, and ![Q^{\pi}(s,a)=\mathbb{E}_{a \sim \pi}[G_t|S_t=s, A_t=a]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-fb78793408bc59dde51b8ee271d116f6_l3.png "Rendered by QuickLaTeX.com") .
.  is accumulated rewards since time step
is accumulated rewards since time step  :
:  .
.
Policy gradient theorem proves that the gradient of policy parameters with regard to  is:
is:
![\nabla_\theta J(\theta) = \mathbb{E}_{\pi}[Q^\pi(s,a)\nabla_\theta ln \pi_\theta(a|s)]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-be1e10121a356cdfda96fad1cd9046e7_l3.png "Rendered by QuickLaTeX.com")
More specifically, the policy gradient theorem we are talking about is stochastic policy gradient theorem because at each state the policy outputs a stochastic action distribution  .
.
However, the policy gradient theorem implies that policy gradient must be calculated on-policy, as  means the state and action distribution is generated by following .
means the state and action distribution is generated by following .
If the training samples is generated by some other behavioral policy  , then the objective function becomes:
, then the objective function becomes:

and we must rely on importance sampling to calculate the policy gradient [7,8]:
![\nabla_\theta J(\theta) = \mathbb{E}_{s\sim d^\beta}[\sum\limits_{a\in A}\nabla_\theta \pi(a|s) Q^\pi(s,a) + \pi(a|s)\nabla_\theta Q^\pi(s,a)] \newline \approx \mathbb{E}_{s\sim d^\beta}[\sum\limits_{a\in A}\nabla_\theta \pi(a|s) Q^\pi(s,a)] \newline =\mathbb{E}_{\beta}[\frac{\pi_\theta(a|s)}{\beta(a|s)}Q^\pi(s,a)\nabla_\theta ln \pi_\theta(a|s)]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-45583aee57264f3e0f6b1e30d1398e67_l3.png "Rendered by QuickLaTeX.com")
where 
However, using importance sampling  could incur some learning difficulty problems [5]:
could incur some learning difficulty problems [5]:
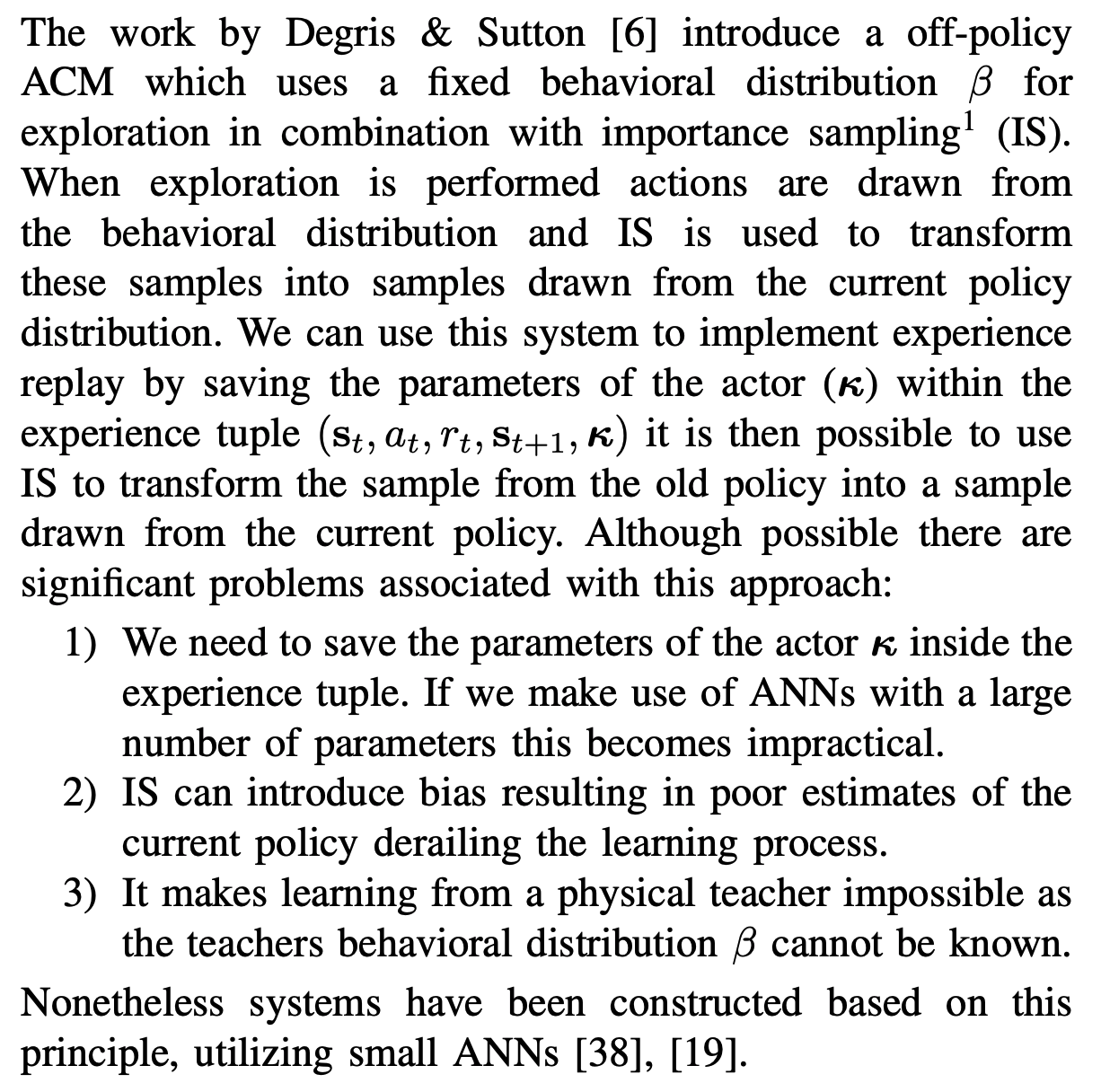
What DPG proposes is that we design a policy that outputs actions deterministically:  , thus would only have integration (or sum) over state distribution and get rid of importance sampling, which makes learning potentially easier:
, thus would only have integration (or sum) over state distribution and get rid of importance sampling, which makes learning potentially easier:

Writing the above formula in integration (rather than discrete sum), we get:

And the gradient of is:
![\nabla_\theta J(\theta) = \int\limits_S d^\beta(s) \nabla_\theta Q^\mu(s, \mu_\theta(s)) ds \approx \mathbb{E}_\beta [\nabla_\theta \mu_\theta(s) \nabla_a Q^\mu(s,a)|_{a=\mu_\theta(s)}]](https://czxttkl.com/wp-content/ql-cache/quicklatex.com-95413f31d5976999e5fcb9526f93b1ca_l3.png "Rendered by QuickLaTeX.com")
This immediately implies that  can be updated off policy. Because we only need to sample
can be updated off policy. Because we only need to sample  , then
, then  can be calculated without knowing what action the behavior policy took (we only need to know what the training policy would take, i.e.,
can be calculated without knowing what action the behavior policy took (we only need to know what the training policy would take, i.e.,  ). We should also note that there is an approximation in the formula of
). We should also note that there is an approximation in the formula of  , because
, because  cannot be applied chain rules easily since even you replace
cannot be applied chain rules easily since even you replace  with
with  , the
, the  function itself still depends on .
function itself still depends on .
Updating is one part of DPG. The other part is fitting a Q-network with parameter  on the optimal Q-function of policy governed by . This equates to update according to mean-squared Bellman error (MSBE) [10], which is the same as in Q-Learning.
on the optimal Q-function of policy governed by . This equates to update according to mean-squared Bellman error (MSBE) [10], which is the same as in Q-Learning.
I haven’t read the DDPG paper [2] thoroughly but based on my rough understanding, it adds several tricks when dealing with large inputs (such as images). According to [9]’s summary, DDPG introduced three tricks:
- add batch normalization to normalize “every dimension across samples in one minibatch”
- add noise in the output of DPG such that the algorithm can explore
- soft update target network
References
[3] Notes on “Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor”: https://czxttkl.com/?p=3497
[4] Policy Gradient: https://czxttkl.com/?p=2812
[9] https://lilianweng.github.io/lil-log/2018/04/08/policy-gradient-algorithms.html#ddpg
[10] https://spinningup.openai.com/en/latest/algorithms/ddpg.html#the-q-learning-side-of-ddpg